机器人的程序
RoboDK是一个专注于工业机器人应用的模拟器。世界杯2022美洲预选赛直播这意味着可以为特定的机器人手臂和机器人控制器创建、模拟和离线生成机器人程序。换句话说,RoboDK是离线编程软件。2022世界杯8强赛时间
要创建机器人程序,需要选择机器人,加载机器人工具,并通过添加目标或使用特定工具(如将CNC程序转换为机器人程序)使用一个或多个CAD来路径特征创建程序。
一个广泛的图书馆工业机世界杯2022美洲预选赛直播器人是可用的。世界杯2022美洲预选赛直播工业机器人在RoboDK中建模的方式与使用供应商特定控制器的方式相同,包括轴限制、运动感和轴连接。

本节展示如何使用RoboDK图形用户界面(GUI)为特定的机器人控制器创建、模拟和生成机器人程序。
2022世界杯8强赛时间离线编程(或离线编程)意味着在生产环境之外对机器人进行编程。2022世界杯8强赛时间离线编程消除了车间编程(使用教学挂件编程)造成的生产停机时间。
仿真和离线编程允许在设置生产单2022世界杯8强赛时间元之前研究机器人单元的多个场景。在设计工作单元时常见的错误可以及时预测。
2022世界杯8强赛时间离线编程是实现机器人系统投资回报最大化的最佳途径,它需要合适的仿真工具。采用新程序的时间可以从几周缩短到一天,从而实现短期生产的自动化。
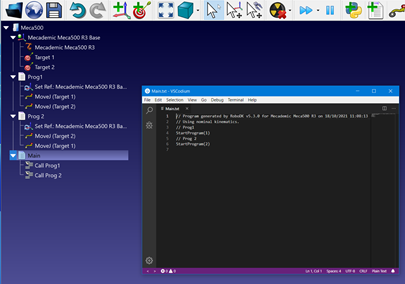
模拟可以通过在程序中添加一系列指令来完成。每个指令代表特定控制器的特定代码,然而,RoboDK提供了一个图形用户界面(GUI),以通用的方式轻松构建机器人程序,而无需编写代码。
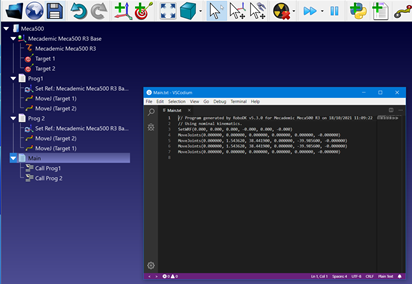
程序生成时,将自动生成机器人控制器专用的代码。使用RoboDK图形用户界面创建一个新的空程序:
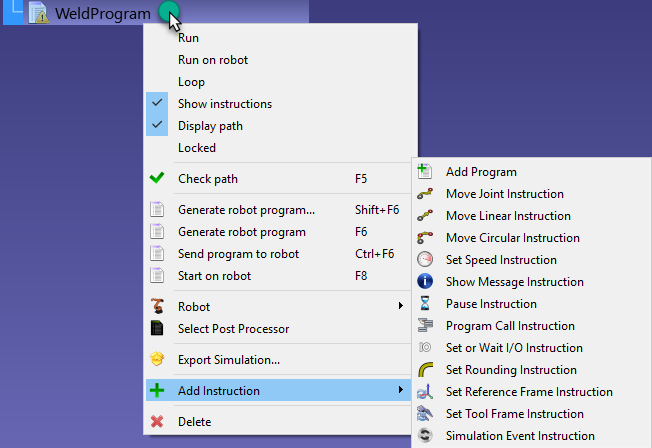
1.选择程序➔![]() 添加程序
添加程序
或者,选择工具栏中相应的按钮。
2.选择工具➔重命名项目…(F2)重命名程序
此操作将创建一个空程序,并允许通过右键单击程序或从选项中选择一条指令来添加新指令程序菜单。下一节程序指令提供有关添加指令的详细信息。
可以通过右键单击程序或从程序菜单,如前一节所示。
介绍RoboDK图形用户界面支持的机器人离线编程指令。2022世界杯8强赛时间
选择程序➔![]() 移动关节指令增加一个新的关节动作指令。或者,选择工具栏中相应的按钮。
移动关节指令增加一个新的关节动作指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了目标,否则移动指令将创建一个新目标并将它们链接起来。如果目标被移动,那么移动也会被修改。
如果这是添加到程序中的第一条指令,则在移动指令之前将添加两条指令:a参考系选择和一个工具框架选择。这将确保当程序达到运动指令时,机器人使用用于创建新目标的相同参考和工具框架。
选择程序➔![]() 移动线性指令添加一个新的线性运动指令。或者,选择工具栏中相应的按钮。
移动线性指令添加一个新的线性运动指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了目标,否则移动指令将创建一个新目标并将它们链接起来。如果目标被移动,那么移动也会被修改。
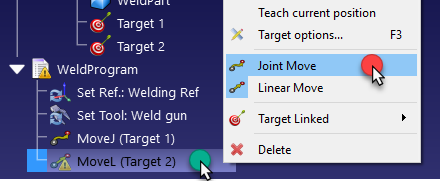
关节移动和线性移动的行为方式相同,可以很容易地从一种类型切换到另一种类型。
与关节移动指令相同,如果这是添加到程序中的第一条指令,则在移动指令之前将添加另外两条指令:a参考系选择和一个工具框架选择。
与关节运动相反,线性运动对机器人的奇异性和轴极限敏感。例如,六轴机器人不能在线性移动后穿过奇点。下图显示了一个例子关节5太接近奇点(0度)。考虑联合行动吧。如下图所示。
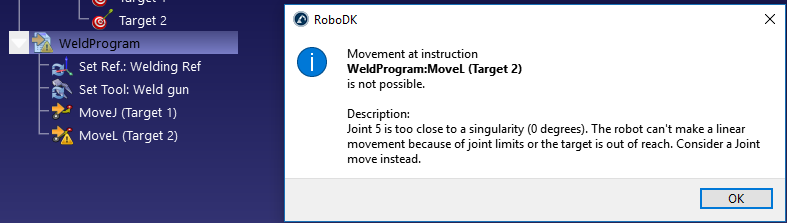
如果线性移动不是严格必要的,右键单击移动指令并将其更改为联合指令。
或者,必须修改目标、TCP或参考帧的位置以避免奇点。
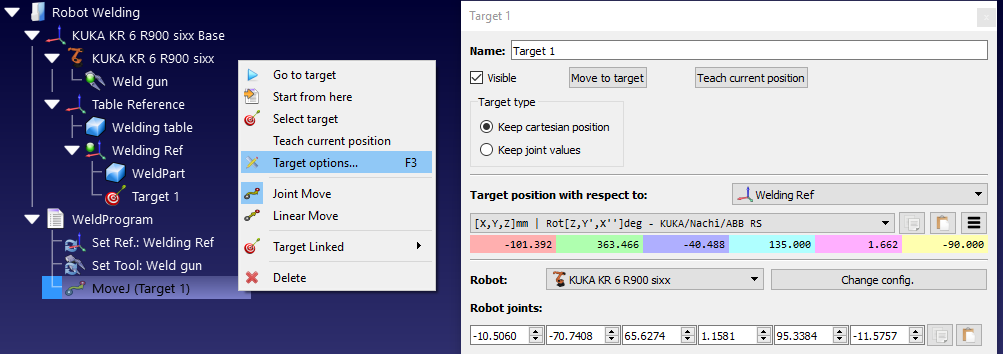
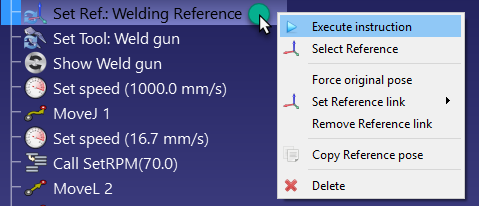
选择程序➔![]() 设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
参考系是一个变量,也称为Work Object (ABB机器人)、UFRAME (Fanuc机器人)、frame (Motoman机器人)或$BASE (KUKA机器人)。
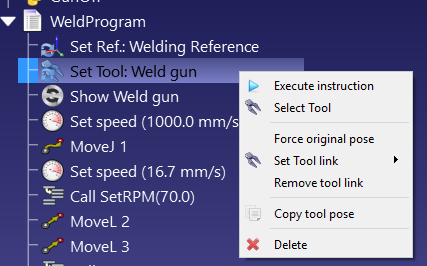
选择程序➔![]() 设置工具框架说明使用特定的工具框架(TCP)。这将更新给定的工具框架上的程序为以下移动指令,并将改变活跃的RoboDK中机器人的工具框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将针对最后一个工具框架集做出。
设置工具框架说明使用特定的工具框架(TCP)。这将更新给定的工具框架上的程序为以下移动指令,并将改变活跃的RoboDK中机器人的工具框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将针对最后一个工具框架集做出。
参考系是一个变量,也称为ToolData (ABB机器人)、UTOOL(发那科机器人)、TOOL(摩托曼机器人)或$TOOL(库卡机器人)。
选择程序➔![]() 移动循环指令添加一个新的圆周运动指令。或者,选择工具栏中相应的按钮。
移动循环指令添加一个新的圆周运动指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了两个目标,否则移动指令不会创建新目标。需要分别添加另外两个目标,并从圆周移动指令中将它们链接起来,如下图所示。
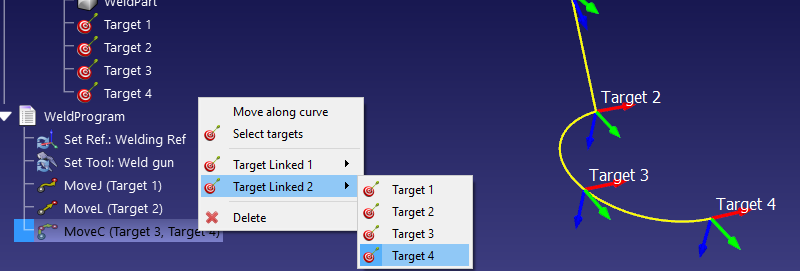
圆形路径是从机器人所在的点创建的圆弧,经过第一个圆形点(目标链接1)并在终点(目标链接2)结束。
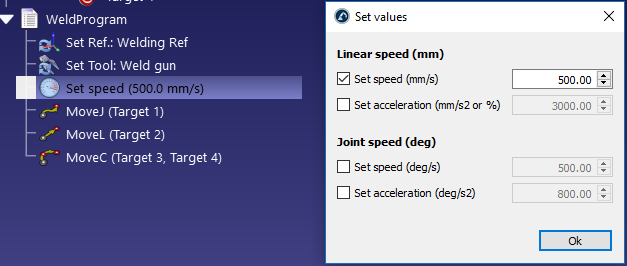
选择程序➔![]() 设定速度指令添加一条改变速度和/或加速度的新指令。可以在关节空间和笛卡尔空间中指定速度和加速度。
设定速度指令添加一条改变速度和/或加速度的新指令。可以在关节空间和笛卡尔空间中指定速度和加速度。
激活相应的案例,在程序中施加特定的速度和/或加速度。机器人的速度从执行该指令的那一刻起生效。
在机器人参数菜单中也可以改变机器人的速度:双击机器人,选择参数。
选择程序➔![]() 显示信息指令添加将在教学挂件上显示消息的新指令。
显示信息指令添加将在教学挂件上显示消息的新指令。

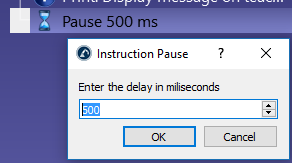
选择程序➔![]() 暂停指令增加一条新指令,使程序暂停执行一段时间或停止程序,直到操作员希望继续执行程序为止。
暂停指令增加一条新指令,使程序暂停执行一段时间或停止程序,直到操作员希望继续执行程序为止。
选择程序➔![]() 程序调用指令从当前程序添加对子程序的调用。
程序调用指令从当前程序添加对子程序的调用。
默认情况下,这是对特定程序的阻塞调用。然而,它是可以切换到插入代码在此指令的位置输入特定的代码。这可能对特定的应用程序和特定的控制器有用。
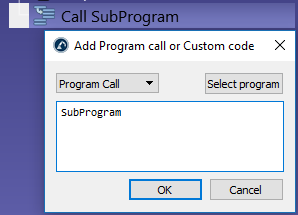
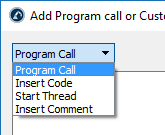
从程序调用来螺纹触发对子程序的非阻塞调用。在这种情况下,控制器将启动一个新线程。此选项仅适用于某些控制器,且仅适用于特定操作。
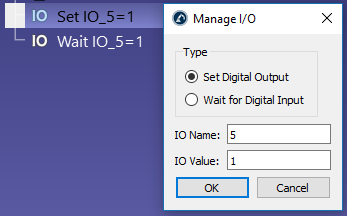
选择程序➔![]() 设置或等待I/O指令改变数字输出(DO)的状态。默认情况下,该指令设置为设置数字输出。该指令还允许等待一个特定的数字输入(DI)切换到一个特定的状态。
设置或等待I/O指令改变数字输出(DO)的状态。默认情况下,该指令设置为设置数字输出。该指令还允许等待一个特定的数字输入(DI)切换到一个特定的状态。
IO Name可以是一个数字,如果它是一个命名变量,也可以是一个文本值。IO值可以是一个数字(0表示False, 1表示True),如果是命名状态,可以是一个文本值。
设置为“等待数字输入”以停止程序执行,直到特定输入更改为特定值。此外,大多数机器人控制器支持超时延迟,当等待时间超过特定值时引发错误。检查超时时间(毫秒)选项以激活此功能。
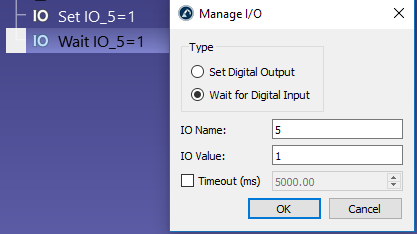
改变模拟数字输入和数字输出将创建新的工作站变量。要检查这些变量的状态,您可以右键单击站点并选择站点参数。也可以通过API读取或修改这些变量。
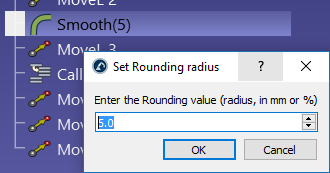
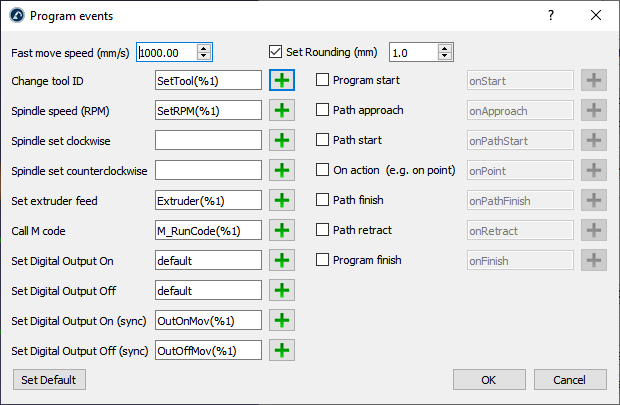
选择程序➔![]() 设置舍入指令更改舍入精度。用于在连续移动之间平滑边缘的舍入精度。这个更改从它在程序中执行的那一刻起生效(与所有其他指令一样),所以通常在程序开始时设置这个值。
设置舍入指令更改舍入精度。用于在连续移动之间平滑边缘的舍入精度。这个更改从它在程序中执行的那一刻起生效(与所有其他指令一样),所以通常在程序开始时设置这个值。
在没有舍入指令的情况下,机器人在每次运动结束时的速度将达到0(除非下一个运动与前一个运动相切)。这将引起高加速和快速的速度变化,以确保每个动作的最佳准确性。
这个值也被称为混合半径(Universal Robots), ZoneData (ABB机器人),CNT/FINE (Fanuc机器人),拐角(Mecademic机器人)或$APO. cdis /$APO。CPTP/Advance(库卡机器人)。
有些控制器需要将此值设置为百分比,例如在Fanuc控制器上,如果要提供CNT5命令,则应输入值5。
参数中指定舍入参数项目活动窗口,如果您正在生成机器人加工,3D打印或曲线/点跟踪程序。
RoboDK的路径精度测试可以让我们更好地理解不同舍入策略的效果。
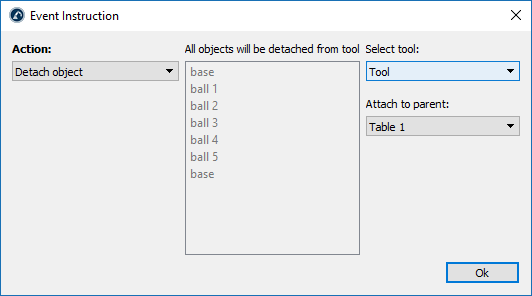
选择程序➔![]() 模拟事件指令来引发一个特定的模拟事件。模拟事件对生成的代码没有影响,并且仅用于引发用于模拟目的的特定事件。
模拟事件指令来引发一个特定的模拟事件。模拟事件对生成的代码没有影响,并且仅用于引发用于模拟目的的特定事件。
使用图形用户界面的模拟事件允许您:
·将物体连接或分离到机器人工具上
·显示或隐藏对象或工具
·改变物体和参考系的位置
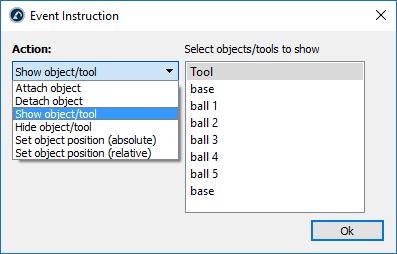
例如,如果机器人移动到一个特定的位置去抓取一个物体,我们可以设置一个连接对象事件将该物体与机器人一起移动。然后,在机器人移动并准备离开物体后,我们可以设置一个分离对象事件以留下工具抓取的任何对象。
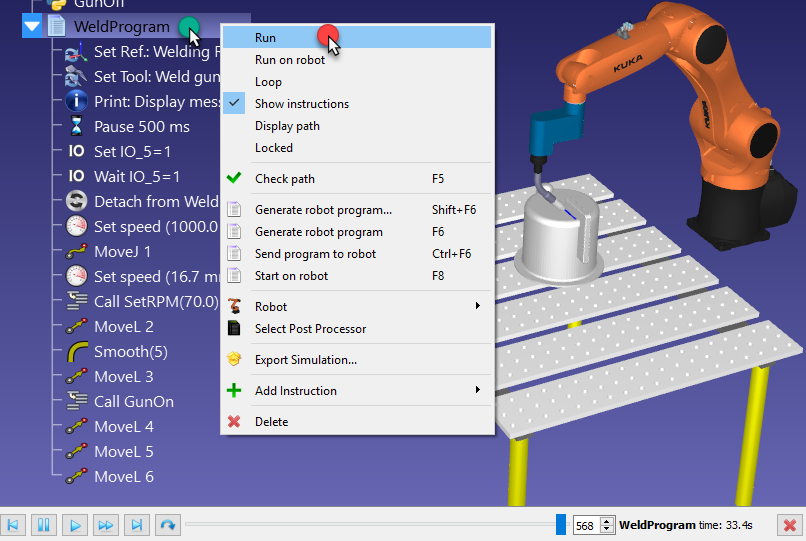
双击程序![]() 启动程序模拟。
启动程序模拟。
另外:
1.右键单击程序
2.选择运行
如果双击程序,将在底部出现模拟条。可以使用仿真条滑动仿真以向前或向后移动仿真。
默认情况下,RoboDK的模拟速度比实时快5倍。这意味着,如果一个程序需要30秒来执行,那么它将在30/5=6秒内被模拟。加速模拟将这个比率提高到100。正常和快速的模拟速度可以在工具中改变➔选项➔运动的菜单。

按照以下步骤生成机器人控制器(厂商专用机器人控制器)所需的机器人程序:
1.选择程序
2.选择程序➔生成项目(s)(F6)
或者,右键单击程序并选择生成机器人程序(F6)来生成程序。
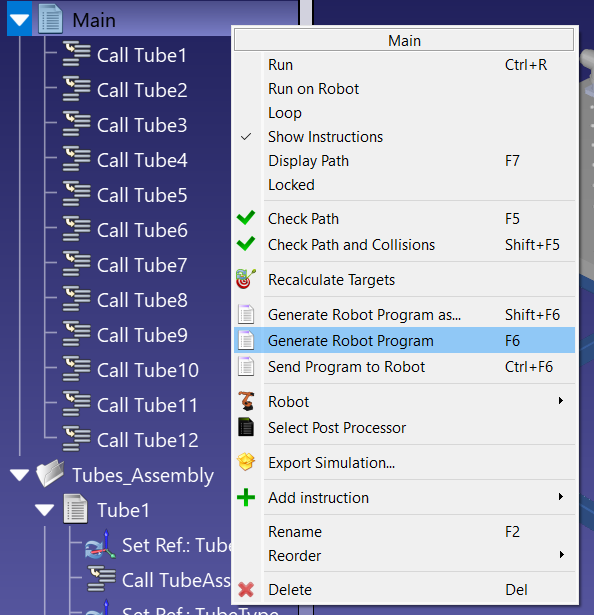
可以选择多个程序来一次生成多个程序。按住Ctrl键选择多个程序。选择生成程序…(Shift+F6)选项将打开一个窗口,要求用户提供保存程序的位置。
将程序从计算机直接传送到机器人上是可能的。该选项通常通过FTP协议或其他特定协议(如使用套接字消息传递或串行连接)将程序发送给机器人。首先,需要在机器人连接菜单中输入机器人IP和FTP设置:
1.右键单击机器人
2.选择连接到机器人…左侧将出现一个窗口。
3.输入机器人IP
4.选择更多的选择输入FTP设置和FTP凭据(如果需要)
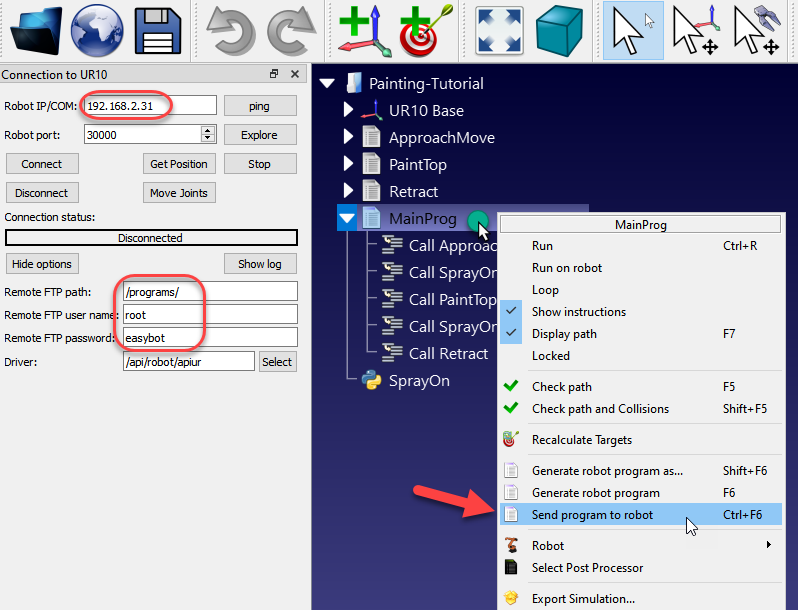
一旦提供了网络设置并正确连接机器人,请按照以下步骤将程序直接从RoboDK传输到机器人:
1.右键单击程序
2.选择发送程序给机器人(Ctrl+F6)
弹出窗口将显示状态(成功或失败)。
从RoboDK仿真到特定机器人程序的转换是由一个后置处理程序。后置处理器定义了如何为特定的机器人生成机器人程序。在RoboDK中,每个机器人都有一个特定的/默认的后置处理器。
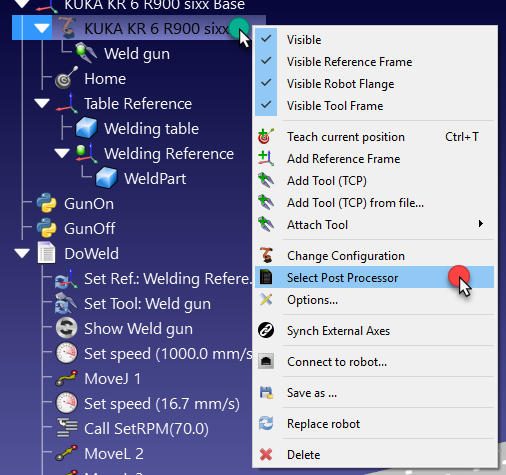
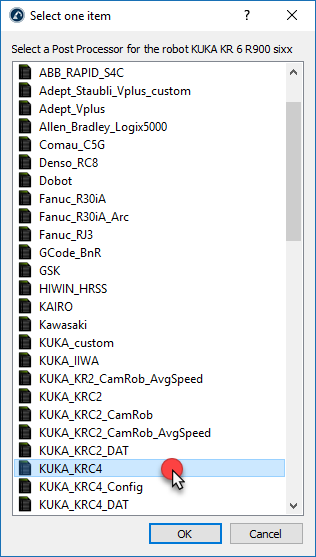
为机器人选择特定的后置处理器:
1.右击机器人或程序
2.选择选择后置处理器
3.从列表中选择一个后置处理器
4.选择OK
现在应用了更改,可以再次生成程序以查看结果。
RoboDK中的后置处理器为生成特定要求的机器人程序提供了完全的灵活性。RoboDK为大多数机器人品牌提供后置处理器。后置处理器可以很容易地创建或修改。中有关后置处理器的更多信息后置处理器专用部分。
您可以自定义为机器人生成程序的方式。
按照以下步骤查看程序生成设置:
1.选择工具➔选项。
2.选择程序选项卡。
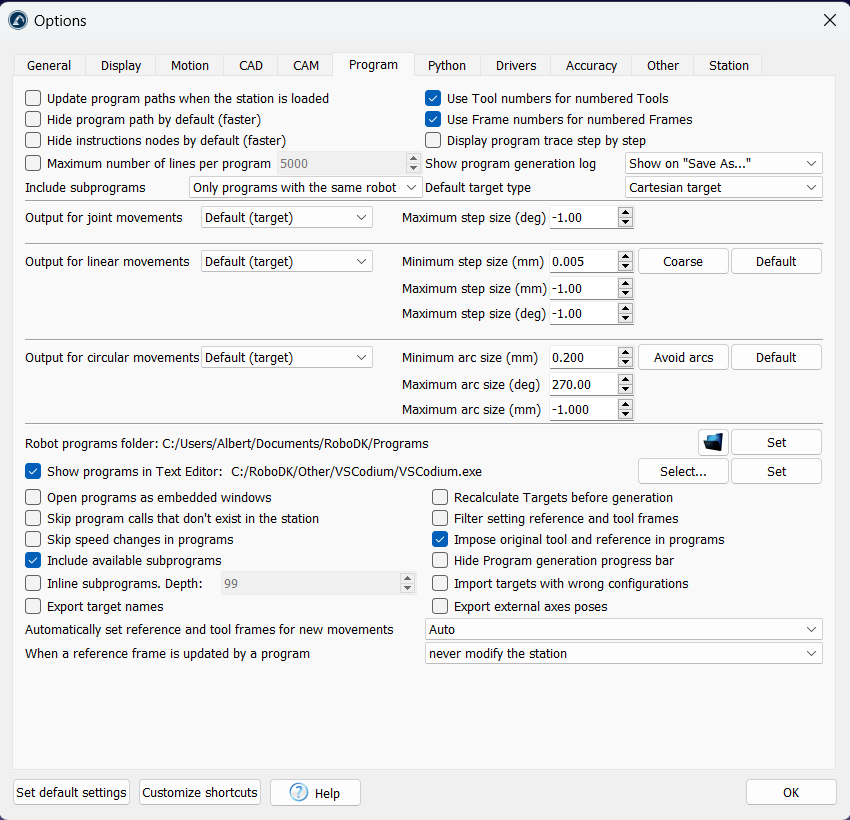
该菜单允许您自定义程序生成,例如:
1.将关节运动分成更小的步骤。
2.将线性运动分割成更小的步骤。
3.将圆周运动转换为小的线性运动。
4.将大型机器人程序拆分为子程序。
5.指定保存机器人程序的默认位置。
6.为机器人程序指定默认的文本编辑器。
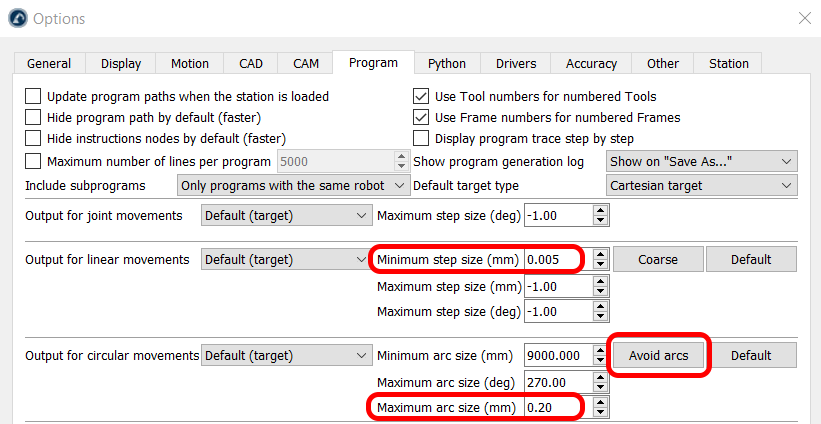
当你为你的机器人生成程序时,你可以很容易地把圆矩转换成小的线性运动。如果你的控制器不支持弧线移动,这很有用。
按照以下步骤生成小线性运动的弧线:
1.选择工具➔选项。
2.选择程序选项卡。
3.选择避免弧。
4.指定最大圆弧尺寸(mm)它定义了沿弧线的直线运动的大小。
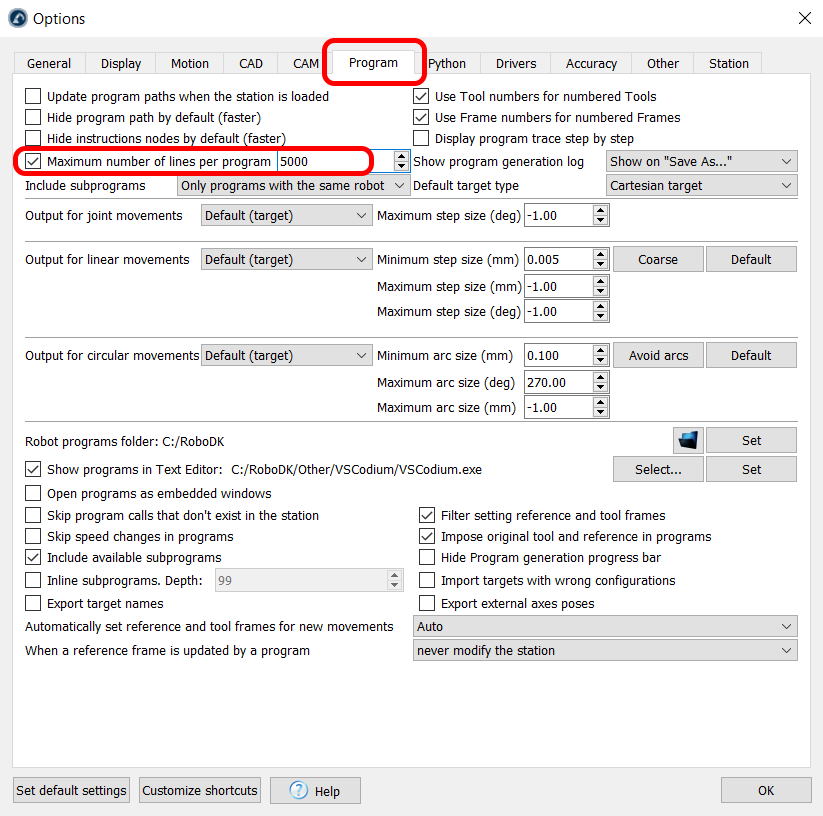
大型机器人程序可能超出机器人控制器的限制。控制器的限制可以是文件大小或每个程序的行数。例如,用于机器人加工或3D打印的机器人程序可能有数千行代码。
在这种情况下,最好将这样一个长程序分成更小的子程序,包括一个运行子程序的主程序。
按照以下步骤自动拆分长程序:
1.选择工具➔选项➔程序
2.检查限制每个程序的最大行数并提供每个程序生成每个文件所需的最大行数。
当你生成一个调用子程序的程序时,RoboDK会自动创建一个调用子程序的指令。另一方面,您可以在主程序上直接将程序输出定制为内联子程序,并防止程序调用。
按照以下步骤执行内联子程序以避免调用脱机程序:
1.选择工具➔选项
2.选择程序选项卡
3.检查选项内嵌子
从现在开始,当您生成包含子程序的程序时,您将直接在第一个/main程序中获得这些子程序的内容。