选项菜单
本文档提供了RoboDK软件中可用的一般选项菜单的概述。
选择工具➔![]() 选项(Shift + O)打开主RoboDK选项窗口。
选项(Shift + O)打开主RoboDK选项窗口。
大多数设置都存储在计算机的用户帐户中。更改用户帐户将不会使更改应用于这些设置。作为例外,站点设置和站点参数(在General选项卡中可用)存储在每个站点(RDK文件)中。
主选项卡包含一般选项,如自定义主题,3D鼠标导航设置,树的外观,激活自动备份或自定义表单中显示的小数点。
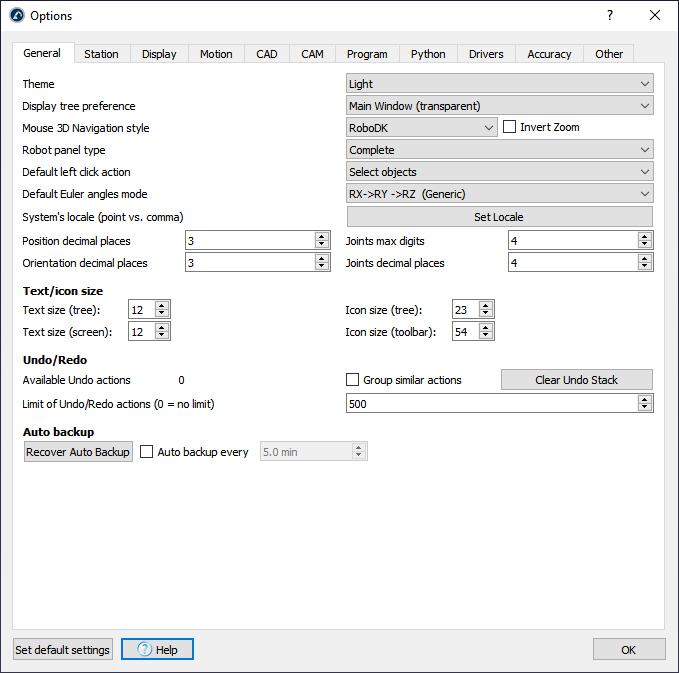
主题将允许您显示RoboDK在黑暗模式,光模式或其他颜色模式默认使用的PC。
的默认设置显示树首选项将在主窗口内显示站点树。更改为侧窗将树显示为单独的窗口。
与鼠标3D导航样式,可以用鼠标指定首选的3D导航类型,并模拟特定的软件,如Rhinoceros, Catia, TopSolid或Vero软件。
的机器人面板类型设为完整的默认情况下。这将显示一个完整的机器人面板。将此选项设置为“普通”或“基本”,以减少机器人面板中可用选项的数量。
的默认的左键操作默认设置为选择对象。可以将其更改为其他3D导航设置,例如,默认情况下旋转。
的默认欧拉角度模式允许在默认情况下选择帧旋转的顺序。一般参考系包含位置和方向信息。参考框架是姿态,它们可以使用XYZ位置和围绕X, Y和z的旋转来表示。旋转的顺序非常重要。RoboDK将根据所使用的机器人预先选择正确的格式/顺序。看到参考帧节获取更多信息。
系统的区域设置允许将区域设置为特定的语言和国家。这将以正确的格式显示数字,并使用适当的小数点字符。
的位置/方向的小数位和关节小数点后十位允许您指定在小数点之前和小数点之后分别显示多少位数字/小数点,分别用于机器人笛卡尔目标和关节目标。
的文本/图标大小节允许更改树和工具栏中的文本和图标的大小。
你可以清除撤消堆栈清除RAM内存。还可以限制将保留在内存中的撤消/重做操作。如果RoboDK使用大量RAM内存或速度变慢,可能是因为存储了大量撤消操作。默认情况下,类似的动作不会被组合在一起,例如,如果一个参考帧被移动,每一个小步骤都会被记录下来。检查将相似的操作捆绑在一起防止这种行为。
工作站参数是选项菜单中唯一与RoboDK项目(RDK文件)一起保存的参数,而不是用户帐户设置。

的将物体附着在机器人工具上的最大距离是由模拟事件.模拟事件可以将对象附加到工具并模拟特定事件。这些事件对生成的代码没有影响,它们仅用于模拟目的。
的站参数是与RDK文件一起保存的状态参数,可以手动修改或通过API修改。车站参数允许模拟数字输入和数字输出并通过API(如PLC)与其他系统进行通信。
display选项卡允许您自定义与3D视图外观相关的设置。
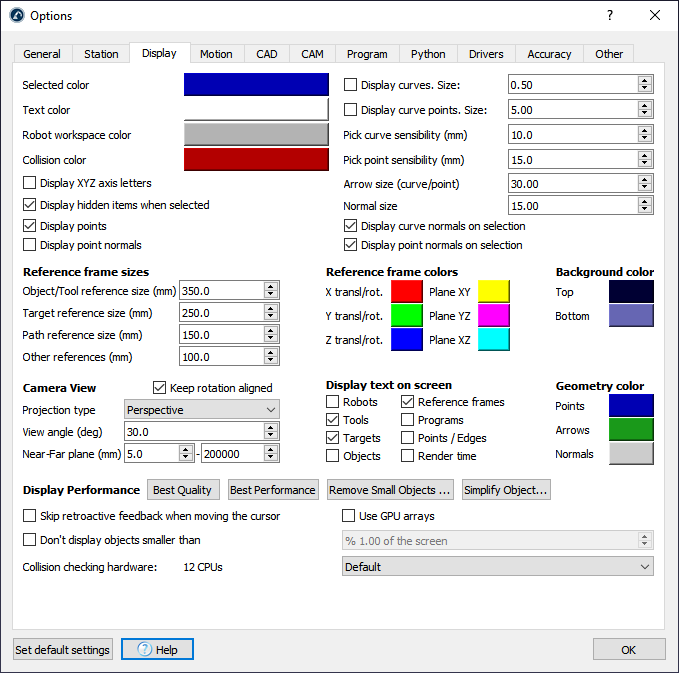
选择“选定颜色”、“文本颜色”、“工作区颜色”或“碰撞颜色”旁边的彩色按钮,以更改3D视图中使用的默认颜色。
选择显示XYZ轴字母以显示具有相应X、Y、Z字母的参考系。默认情况下,不显示它们,并分别使用红(X)、绿(Y)和蓝(Z)颜色。
增加了拾取曲线/点敏感性为了更容易分别选择曲线和点。或者,如果曲线或点彼此太接近并且不容易选择它们,则最好减少这些值。
箭头大小(曲线/点)绿色箭头的大小是否显示在曲线或点跟随项目中(可从公用事业公司菜单)。
对象/目标/路径/其他参考大小将定义屏幕上特定项目的框架大小。建议使用键“+”和“-”来按比例增加或缩小大小。
参考帧的颜色可以手动更新,也可以手动更新渐变背景颜色(用鼠标移动参考帧时显示平面颜色)。
的相机视图设为的角度来看默认情况下。可以将其更改为拼字正确的并更新一些相机设置,如视角和近/远平面。
取消保持旋转对齐旋转:在任何方向上自由旋转
缺省情况下,显示设置为获取最好的质量结果。设置显示性能来最佳的性能如果RoboDK因为显示的对象太多而变慢。这将强制使用GUP,而不是在屏幕上显示小对象。
也可以在3D屏幕上显示RoboDK(使用3D视图进行虚拟现实)。立体相机距离将定义物体的远近感觉。
运动选项卡允许您自定义机器人模拟的行为和RoboDK使用的公差,以显示或防止机器人奇点和碰撞。

模拟时间比率定义了模拟相对于实时发生的速度。默认的模拟比率为5意味着在模拟器上花费的1秒等于在机器人上实时运行的5秒。更多信息请参见模拟比例部分。
![]() 检查碰撞和
检查碰撞和![]() 碰撞的地图允许激活/取消激活碰撞检查。这些设置也可以从工具栏或工具”菜单.默认情况下,如果检测到碰撞,所有程序和移动机器人将停止,取消勾选当检测到碰撞时,停止机器人运动避免这种行为。中有关碰撞映射设置的更多信息碰撞提示部分.
碰撞的地图允许激活/取消激活碰撞检查。这些设置也可以从工具栏或工具”菜单.默认情况下,如果检测到碰撞,所有程序和移动机器人将停止,取消勾选当检测到碰撞时,停止机器人运动避免这种行为。中有关碰撞映射设置的更多信息碰撞提示部分.
移动时间计算定义了RoboDK如何计算周期时间,以及机器人如何使用线性/角速度/加速度进行模拟和计时。更多信息请参见周期时间部分.
如果模拟比率太快,计算机可能无法在每条路径的末端显示机器人以保持快速模拟。为了避免这种影响:检查总是在每个动作结束时显示机器人.
最大路径步长(毫米/度)定义了RoboDK如何离散任何线性和关节运动分别用于仿真目的。
的避免手腕奇点的公差(度)是避免关节5(度)奇点的阈值角,因此它远离0度(或当轴4和轴6平行时)。此设置适用于大多数六轴机器人手臂,包括协作机器人。如果在机器人程序中检测到奇异点,则必须更改程序以确保其运行不存在奇异点。降低这些公差会让你对RoboDK更宽容,但你可能会遇到奇点警告或错误与你的真正的机器人控制器。
类似的设置适用于防止肘部奇点(度)和前/后奇点(毫米)。
CAD部分(计算机辅助设计)允许您指定与导入参数文件(STEP/STP和IGES/IGS)相关的设置,并在3D环境中显示这些文件。
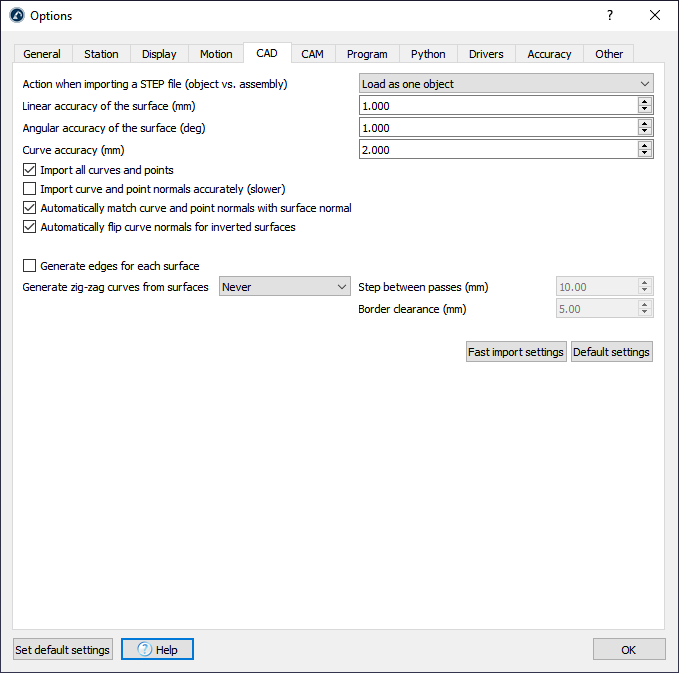
增加表面的线性/角度精度,以更快地导入文件。减少这些值可以提高导入对象的准确性。
如果我们使用曲线或点遵循项目(从)公用事业公司菜单),我们正在使用快速导入设置,它将不可能选择曲线包括在这些类型的参数文件。在这种情况下,选中该选项导入所有的曲线和点.
曲线精度定义了如何从参数文件导入精确的曲线。默认情况下,RoboDK将导入这些文件中包含的所有曲线。此外,RoboDK将在3D文件中提取曲线的边缘。
可以从每个表面自动生成锯齿形曲线,并指定通道之间的步骤以及曲线与边界保持的距离。这可能对绘画或检查应用程序很有用。
CAM部分(计算机辅助制造)显示了与机器人制造操作相关的所有设置,例如机器人加工或3D打印,以及如何导入使用CAM软件创建的机器人刀具路径。
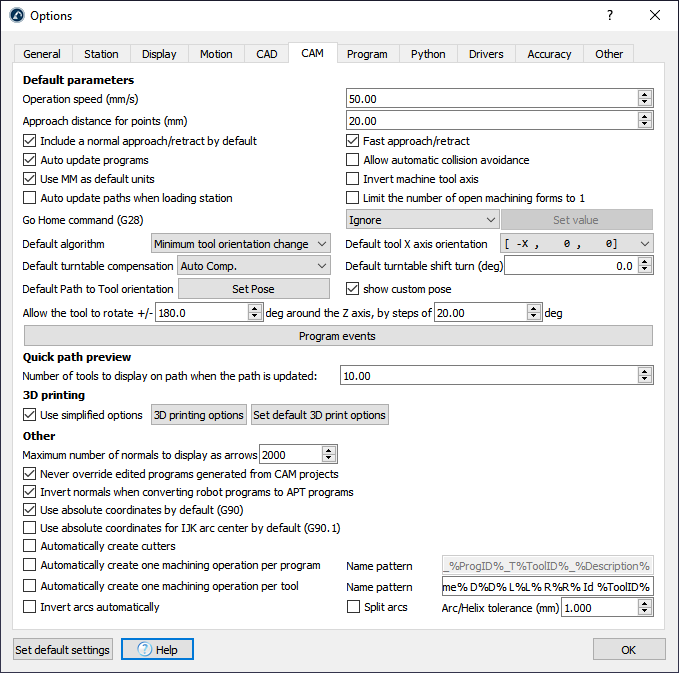
的操作速度是曲线和点跟随项目操作中使用的默认速度。中的曲线/点跟踪项目可用公用事业公司菜单。
的点的接近距离是用于接近点跟随项目中的点的默认距离。此选项对于钻孔或点焊等应用非常有用。
默认情况下包括一个正常的接近/收回将包括一个100mm的正常方法的工具路径。
可以忽略返回Home命令(G28 ISO代码)由一些机器人加工程序设置或设置为特定值(XYZ坐标)。
的项目活动定义针对特定g代码事件所采取的行动,例如设置数字输出、管理挤出机头或在制造操作的不同阶段触发特定程序。
在启动新的机器人加工项目时,可以使用其他选项来定义默认设置。中提供的设置相同机器人加工菜单。
的快速路径预览节允许设置在移动参考框架或制造操作的工具框架时显示多少工具作为预览。
可以打开3D打印选项切片机从3D打印部分。一个切片器将一个对象分割成一个机床路径,然后,刀具路径可以很容易地转换为机器人程序与RoboDK。
由CAM程序生成的机器人程序可以在生成后进行修改。但是,从机器人加工菜单更新设置将覆盖任何先前生成的程序。检查永远不要覆盖从CAM项目生成的编辑过的程序以避免丢失任何更改。
的显示路径法线长度(mm)是表示CAM刀具轨迹法线的白色矢量的长度。CAM工具路径以绿色显示。
Program选项卡允许您自定义与机器人相关的设置项目以及如何生成程序文件。
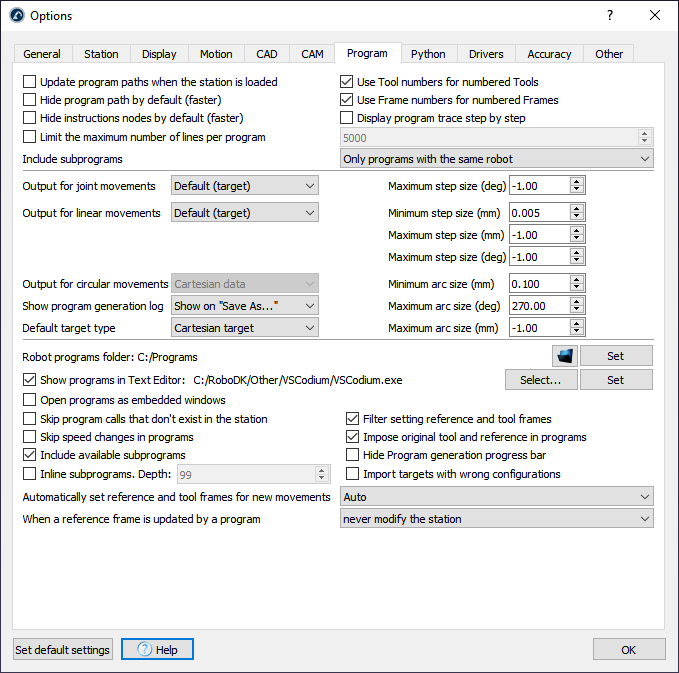
检查当站点加载时更新程序路径重新计算机器人程序。此操作将显示程序问题,并以警告标志显示有问题的程序![]() .这与右键单击每个程序并选择检查路径(F5)的效果相同。取消选中此选项以更快地加载项目。
.这与右键单击每个程序并选择检查路径(F5)的效果相同。取消选中此选项以更快地加载项目。
检查默认隐藏程序路径生成新程序时不显示程序路径。右键单击程序并选中/取消选中显示路径分别显示/隐藏机器人TCP的黄色路径。
使用工具/框架编号编号的工具/框架将使用工具/参照系的相应寄存器号,而不是更新机器人控制器上的工具和参照系位姿。这适用于大多数使用编号寄存器而不是变量的机器人控制器。这种行为也可以使用后处理器进行定制。
可以强制一个特定的目标输出关节/直线运动在程序生成上,通过施加联合或笛卡尔数据。默认情况下,RoboDK将使用目标设置(关节坐标用于关节目标,笛卡尔坐标用于笛卡尔目标)。
默认情况下,RoboDK将创建新的目标作为笛卡尔目标,这意味着如果一个参考框架被移动,机器人到达目标的位置将会不同。可以选择联合目标来施加不随参考/工具变化而变化的绝对目标。
选择跳过电台中不存在的节目呼叫忽略生成程序。
在程序中使用参考系时(使用设置参考系指令),然后移动参照点,机器人的运动就会改变。默认情况下,设置参考系指令将机器人参考系放置在原始位置,而不改变工位参考系。
限制每个程序的最大行数可以指定程序最多有多少行。这将把一个长程序分成子程序,并生成一个主程序,按顺序运行这些小程序。机器人控制器的容量有限,只能运行一定规模的程序。除了特定的/旧的机器人控制器,大多数控制器可以在一个程序中处理5000行。
最后,在使用内置后置处理器时,特定的设置可用于特定的机器人品牌。另一方面,自定义后置处理器允许在程序生成之前自定义或强加某些行为。
Python选项卡允许您设置RoboDK使用的Python解释器和Python编辑器的路径。大多数后处理器要求Python允许您生成特定品牌的机器人程序。还有一些使用的例子RoboDK API需要安装Python。
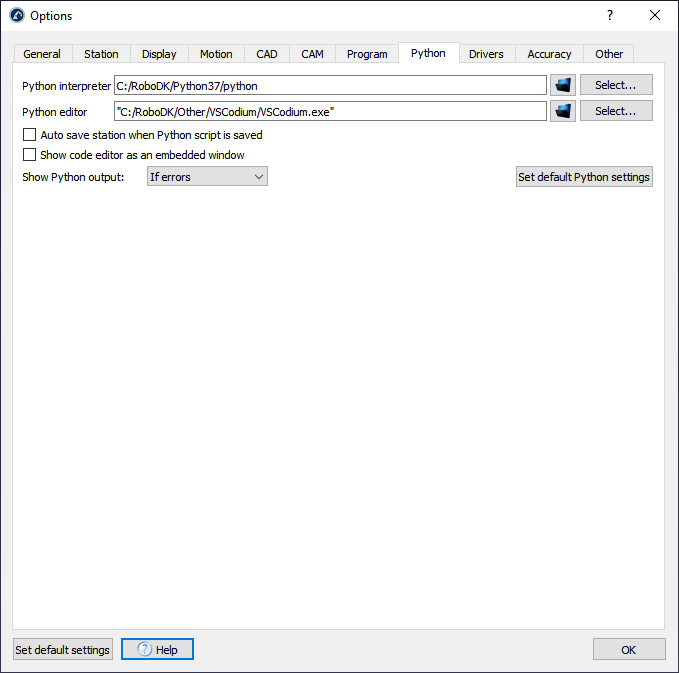
选择选择……以自动显示可用的Python解释器。使用大多数机器人后置处理器和RoboDK API都需要Python。
你可以选择保存Python脚本时自动保存站以在每次保存脚本时保存RDK项目。
还建议在Windows中使用VSCode, VSCodium或notepad++来查看或修改程序和机器人后处理器。
的机器人司机设置允许您自定义的行为机器人司机.相反后处理器(其中程序脱机生成,然后在机器人上加载和执行),机器人驱动程序允许您直接从计算机移动机器人。

选择当连接到机器人时,使用RoboDK管理I/O模拟输入和输出作为RoboDK站参数,而不是改变真实机器人的输入/输出状态(这是一些机器人驱动程序支持的)。
的选项当连接到机器人时,在RoboDK中显示机器人反馈将在机器人移动时实时显示机器人运动(仅兼容机器人驱动程序)。
选择在直接从PC运行程序之前显示警告信息在程序从PC执行之前显示一个弹出窗口(当使用Start on Robot选项时)。
取消永远不要强制停止由RoboDK启动的子进程如果你遇到机器人司机的问题。这将确保在创建到机器人的新连接时没有其他进程在后台运行。
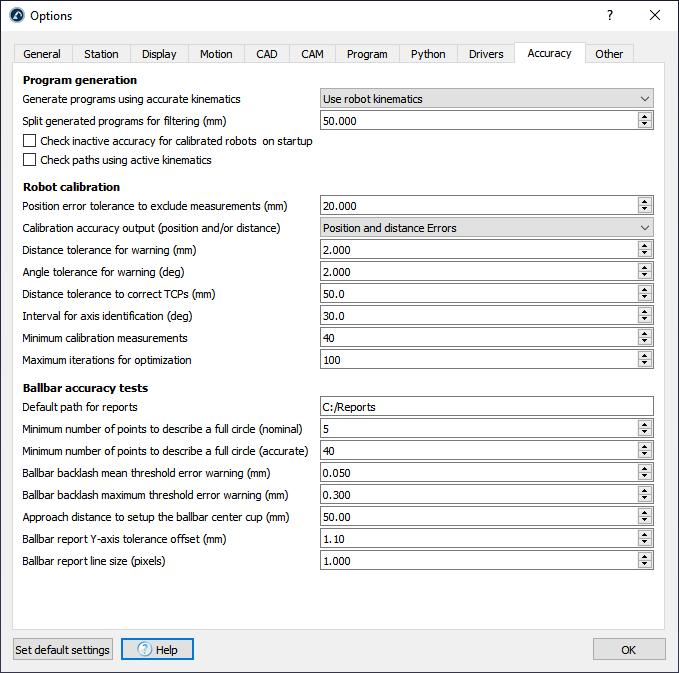
准确性选项卡显示了与机器人标定以及机器人性能测试等ballbar测试.
Other选项卡允许您自定义与RoboDK API相关的设置,激活web服务器视图,设置代理服务器和自定义3D鼠标的行为(如3D connecnexion)。
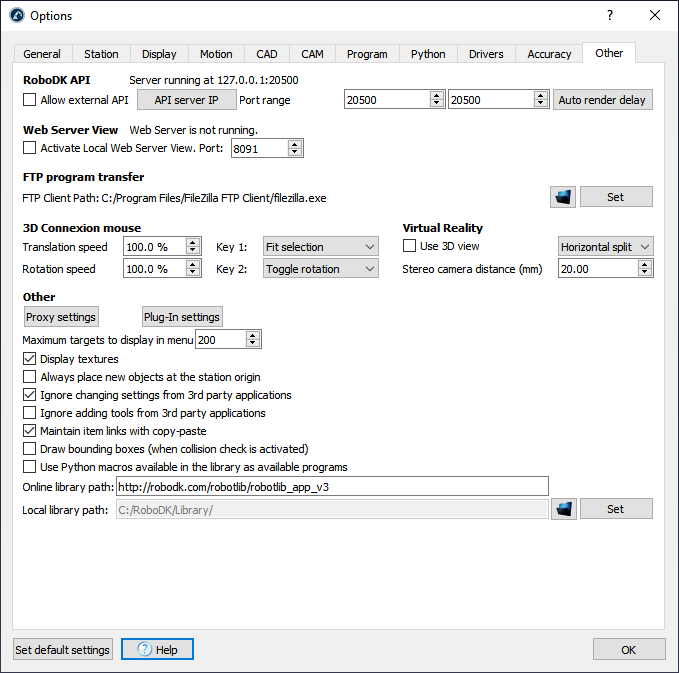
建议安装FileZilla Client,以便将机器人程序从计算机直接传输到机器人,如果两者连接在同一网络中(大多数机器人控制器支持FTP传输)。
通过检查,可以允许RoboDK API的外部通信允许外部API并选择适当的服务器IP和端口。
选择激活本地Web服务器视图将您的计算机转换为web服务器查看器,您可以在其中连接并查看您的模拟为3D HTML模拟。
可以使用a3D连接鼠标,例如SpaceNavigator,并使用3D鼠标更改默认的平移和旋转速度。
选择代理设置在使用网络许可证或连接到在线库时使用代理服务器。