机器人的程序
将程序从计算机直接传送到机器人上是可能的。该选项通常通过FTP协议或其他特定协议(如使用套接字消息传递或串行连接)将程序发送给机器人。首先,需要在机器人连接菜单中输入机器人IP和FTP设置:
1.右键单击机器人
2.选择连接到机器人…左侧将出现一个窗口。
3.输入机器人IP
4.选择更多的选择输入FTP设置和FTP凭据(如果需要)
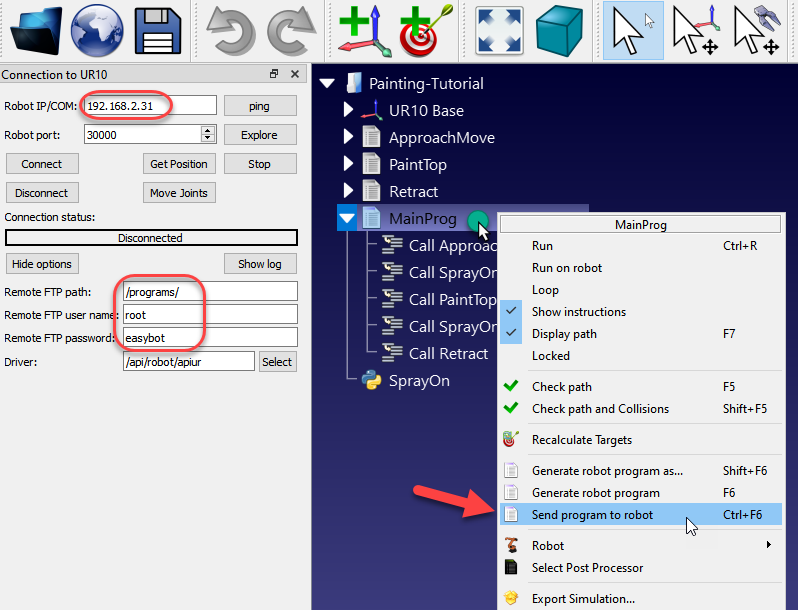
一旦提供了网络设置并正确连接机器人,请按照以下步骤将程序直接从RoboDK传输到机器人:
1.右键单击程序
2.选择发送程序给机器人(Ctrl+F6)
弹出窗口将显示状态(成功或失败)。