选项菜单
Program选项卡允许您自定义与机器人相关的设置项目以及如何生成程序文件。
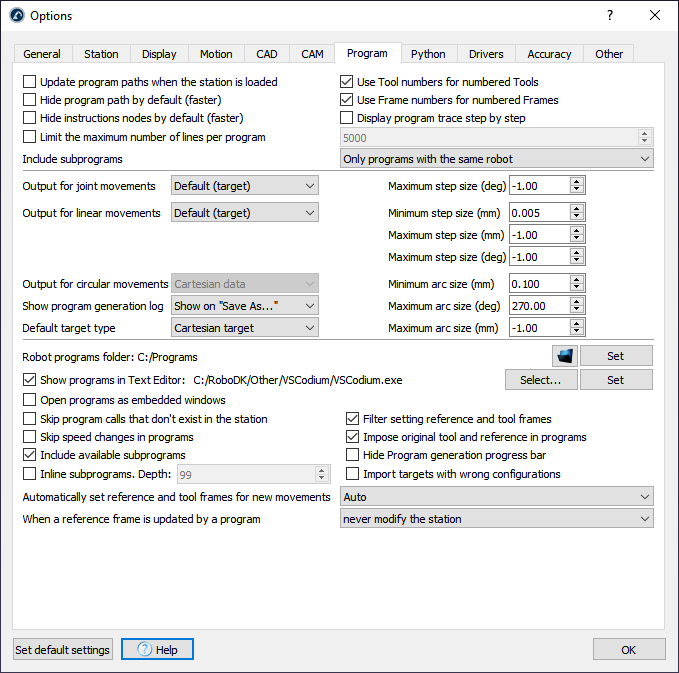
检查当站点加载时更新程序路径重新计算机器人程序。此操作将显示程序问题,并以警告标志显示有问题的程序![]() 。这与右键单击每个程序并选择检查路径(F5)的效果相同。取消选中此选项以更快地加载项目。
。这与右键单击每个程序并选择检查路径(F5)的效果相同。取消选中此选项以更快地加载项目。
检查默认隐藏程序路径生成新程序时不显示程序路径。右键单击程序并选中/取消选中显示路径分别显示/隐藏机器人TCP的黄色路径。
使用工具/框架编号编号的工具/框架将使用工具/参照系的相应寄存器号,而不是更新机器人控制器上的工具和参照系位姿。这适用于大多数使用编号寄存器而不是变量的机器人控制器。这种行为也可以使用后处理器进行定制。
可以强制一个特定的目标输出关节/直线运动在程序生成上,通过施加联合或笛卡尔数据。默认情况下,RoboDK将使用目标设置(关节坐标用于关节目标,笛卡尔坐标用于笛卡尔目标)。
默认情况下,RoboDK将创建新的目标作为笛卡尔目标,这意味着如果一个参考框架被移动,机器人到达目标的位置将会不同。可以选择联合目标来施加不随参考/工具变化而变化的绝对目标。
选择跳过电台中不存在的节目呼叫忽略生成程序。
在程序中使用参考系时(使用设置参考系指令),然后移动参照点,机器人的运动就会改变。默认情况下,设置参考系指令将机器人参考系放置在原始位置,而不改变工位参考系。
限制每个程序的最大行数可以指定程序最多有多少行。这将把一个长程序分成子程序,并生成一个主程序,按顺序运行这些小程序。机器人控制器的容量有限,只能运行一定规模的程序。除了特定的/旧的机器人控制器,大多数控制器可以在一个程序中处理5000行。
最后,在使用内置后置处理器时,特定的设置可用于特定的机器人品牌。另一方面,自定义后置处理器允许在程序生成之前自定义或强加某些行为。