选项菜单
主选项卡包含一般选项,如自定义主题,3D鼠标导航设置,树的外观,激活自动备份或自定义表单中显示的小数点。
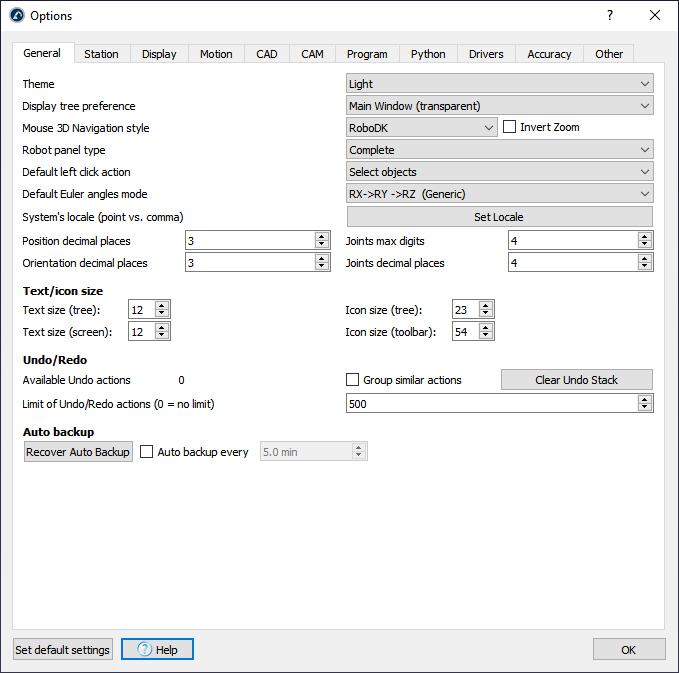
主题将允许您显示RoboDK在黑暗模式,光模式或其他颜色模式默认使用的PC。
的默认设置显示树首选项将在主窗口内显示站点树。更改为侧窗将树显示为单独的窗口。
与鼠标3D导航样式,可以用鼠标指定首选的3D导航类型,并模拟特定的软件,如Rhinoceros, Catia, TopSolid或Vero软件。
的机器人面板类型设为完整的默认情况下。这将显示一个完整的机器人面板。将此选项设置为“普通”或“基本”,以减少机器人面板中可用选项的数量。
的默认的左键操作默认设置为选择对象。可以将其更改为其他3D导航设置,例如,默认情况下旋转。
的默认欧拉角度模式允许在默认情况下选择帧旋转的顺序。一般参考系包含位置和方向信息。参考框架是姿态,它们可以使用XYZ位置和围绕X, Y和z的旋转来表示。旋转的顺序非常重要。RoboDK将根据所使用的机器人预先选择正确的格式/顺序。看到参考帧节获取更多信息。
系统的区域设置允许将区域设置为特定的语言和国家。这将以正确的格式显示数字,并使用适当的小数点字符。
的位置/方向的小数位和关节小数点后十位允许您指定在小数点之前和小数点之后分别显示多少位数字/小数点,分别用于机器人笛卡尔目标和关节目标。
的文本/图标大小节允许更改树和工具栏中的文本和图标的大小。
你可以清除撤消堆栈清除RAM内存。还可以限制将保留在内存中的撤消/重做操作。如果RoboDK使用大量RAM内存或速度变慢,可能是因为存储了大量撤消操作。默认情况下,类似的动作不会被组合在一起,例如,如果一个参考帧被移动,每一个小步骤都会被记录下来。检查将相似的操作捆绑在一起防止这种行为。