一般建议
本节涵盖以下主题:
●如何校准工具(TCP)
●如何校准参考系
●小贴士碰撞检测
●提示导入STEP或IGES文件
●如何改变仿真速度
●如何计算周期时间程序的
机器人工具或工具中心点(TCP)是用于将机器人移动到笛卡尔位置的点(例如给定XYZWPR值的笛卡尔目标)。TCP被定义为机器人法兰的转换。在任何机器人应用程序中,无论是否涉及离线编程,正确定义TCP都很重要。2022世界杯8强赛时间
按照以下步骤定义或校准机器人工具(工具中心点,或TCP):
1.选择公用事业公司➔![]() 定义工具框架(TCP)
定义工具框架(TCP)
2.选择工具来定义/校准。
或者,右键单击工具并选择![]() 定义TCP.
定义TCP.
3.选择方法:
一个。用TCP的尖端触摸一个点,使用不同的工具方向(逐点校准XYZ)
b。用TCP触摸一个平面,使用不同的工具方向(通过平面校准XYZ)。TCP可以是一个点或球体。

4.使用关节值进行TCP校准是默认设置。如果你有笛卡尔目标,将其更改为姿势。
5.如果项目中有多个可用机器人,请选择机器人。
6.调整您想要用来校准TCP的点的数量。该值也可以稍后修改。
7.开始在表中填写测量的配置(接头值或法兰的位置和方向)。
8.最后,选择更新来应用RoboDK站中选择的新定位工具。
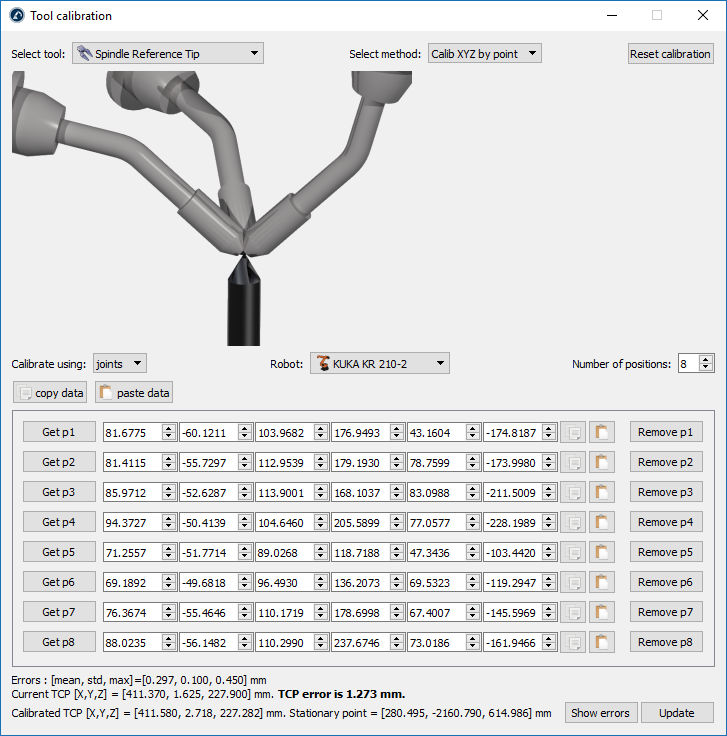
作为示例,下面的图像显示了通过选择删除点6之前的错误删除p6按钮。

参考系定义了物体相对于机器人的位置(位置和方向)。建议根据您可以用机器人定义的参考来教授目标。参考框架允许您调整或移动您的程序到不同的位置,而不必重新教授所有的目标。
有关参考系的更多信息,请参见入门部分.
定义参考系需要使用机器人工具探测一些点(需要在特定位置检索关节值)。
按照以下步骤确定与机器人相关的参照系:
1.选择公用事业公司➔![]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![]() 定义参考系.
定义参考系.
3.选择方法:
一个。3点法(用3理查德·道金斯横过Y+轴的点)
b。3点法(用1圣点为参考系的原点)
c。6个
d。转台校准选项允许在转台上定位参考框架,使转台轴正确对齐

4.关节值被用作默认设置。如果你知道每个点相对于机器人基座的XYZ位置,就把它改成点。
5.如果有多个机器人可用,请选择该机器人。
6.开始用测量点(关节值或点)填充表格。
7.最后,选择更新将新位置应用于RoboDK站中选定的参考系。

本节解释了一个对象的参考系(坐标系)是如何根据其自身的几何形状进行对齐的。该部分允许将对象的参考框架移动到可以在实际设置中识别的位置。
遵循以下步骤,根据物体几何形状的特定点虚拟地对齐物体的参考框架:
1.加载对象
2.选择活动的![]() 站
站
3.选择程序➔![]() 添加参考系.
添加参考系.
确保参考帧直接连接到站点根(而不是其他参考帧)。
4.右键单击参考框架并选择![]() 校准参考系。
校准参考系。
该过程与前一节非常相似。主要区别在于我们必须选择虚拟对象的点而不是真实对象的点。
5.选择所需的校准方法。
例如:3点方法(第三个点穿过Y+轴)。
6.选择校正使用点
7.选择工具➔测量打开测量工具
8.选择绝对按钮,使点相对于站点(绝对参考)进行测量。
9.依次选择虚拟物体上的3个点,输入到参考系校准窗口中
10.选择更新.参考系应该出现在期望的位置。
11.右键单击对象并选择改变的支持.然后,选择新的参考系。物体的绝对位置不会改变。然而,物体相对于新参考系的相对位置将被适当地定义。
12.对象及其自身的参考已经为离线编程做好了准备:将新的参考框架拖放到机器人参考框架中。2022世界杯8强赛时间

本节解释如何在共享公共参考框架的情况下对两个或多个机器人进行离线编程。
在典型的离线编程应用程序中2022世界杯8强赛时间,对象的位置相对于机器人更新。然而,当两个或多个机器人用于相同的应用时,每个机器人的位置必须相对于一个共同的参考(一个参考物体或一个共同的参考框架)更新。
按照以下步骤更新两个或多个机器人相对于参照系的位置:
1.确保机器人参照系和物体参照系不相互依赖。如果存在依赖关系,我们应该将参考框架附加到站点项目上。
2.在每个机器人基础框架上添加一个新的参考系,就像你要为每个机器人定义一个新的单独的参考系一样(Real Ref. A和Real Ref. B).
这个参考系将表示零件相对于每个机器人的真实位置。
3.使用标准分别校准这些参考框架(Real Ref. A和Real Ref. B)参考校正程序(以三点法为例)
在这一点上,我们将看到3个参考框架应该是一致的,但它们不是。必须更新每个机器人的参考系来解决这个问题:
4.双击其中一个机器人引用,例如机器人A基地打开参考框架窗口
5.将机器人基座参考点的位置复制到该机器人的校准参考点(Real Ref. A),选择复制按钮
6.在同一窗口中,更改相对于的参考位置(下拉)到引用对象
7.粘贴复制的位置。机器人会被移动Real Ref. A会不会与引用对象框架
8.对其他机器人(如果有的话)重复上述步骤4-7
在此过程结束时,所有参考帧应匹配,所有校准参考帧与标准帧之间的关系应匹配引用对象应该是一样的。

的参考系定义工具在前一节中描述了两种校准转台相对于机器人的位置的方法。转台的校准/识别可以使用带有适当定义的工具或测量系统(如激光跟踪器)的机器人完成。
当我们移动转盘轴时,我们需要多次检索转盘中一个点的位置。我们目前支持校准1轴和2轴转盘。
按照此程序校准1轴转台。
1.选择公用事业公司➔![]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![]() 定义参考系.
定义参考系.
3.选择方法转台校正(1轴)

4.选择使用校准关节(默认设置)。你可以把它变成点如果你知道每个点相对于机器人基座的XYZ位置。
5.如果工作站上有多个可用机器人,请指定机器人。
6.选择你想要的分数(最低要求是3分)。
7.开始用机器人关节位置(或点)填充表格。

8.最后,选择更新将新位置应用于RoboDK站中选定的参考系。
9.选择“显示误差”,显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)

按照这个程序校准一个2轴转盘。
1.选择公用事业公司➔![]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![]() 定义参考系.
定义参考系.
3.选择方法转台校正(二轴)

4.选择使用校准关节(默认设置)。你可以把它改为点(而不是关节),如果你有每个点相对于机器人基础框架的XYZ位置。
5.如果工作站上有多个可用机器人,请指定机器人。
6.选择你想要的分数(最低要求是6分:每个轴3分)。
7.开始用机器人关节位置(或点)填充表格。

8.最后,选择更新将新位置应用于RoboDK站中选定的参考系。
9.选择“显示误差”,显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)

STEP和IGES文件是RoboDK支持的两种文件格式。STEP和IGES文件是参数化的3D文件。还支持其他格式。
如果文件很大或很复杂,导入STEP或IGES文件可能需要很长时间。在这种情况下,可以减少在Tools中导入这些文件所需的时间➔选项➔计算机辅助设计菜单并选择快速导入设置.

此选项将更新默认设置以更快地导入这些参数文件。另一方面,曲线边缘将不会被导入,并且表面的精度可能不那么光滑。
中导入设置的更多信息计算机辅助设计菜单.
如果您有一个大型或复杂的单元,您可能会在模拟中遇到较差的显示性能或较低的帧速率。如果你的工作站中有很多物体或复杂的几何结构,就会发生这种情况。导入大型3D文件会降低帧率并降低模拟速度(参见以前的部分)。
您可以遵循以下一个或多个步骤来提高模拟速度并获得更快的帧速率:
一)忽略显示小对象:选中工具➔选项➔显示选中“不显示小于”的对象,并将其设置为2%或更大。
b)简化对象几何:选择简化对象……在同一个显示选项卡中。此操作不会改变3D对象的外观。选择该站的根(第一项)将对该站中的所有对象应用简化。
c)移除小物体:选中移除小物件……移除小物体和三角形。这将删除小于给定大小的对象和三角形。

一旦你有一个模拟/程序准备在RoboDK,你可以很容易地导出它作为一个共享的RoboDK的Web链接,作为一个3D HTML或3D PDF。
您可以按照以下步骤为Web公共链接,3D HTML和3D PDF文档生成RoboDK:
1.右键单击您的程序(主程序在这个例子中)
2.选择![]() 出口仿真……
出口仿真……
3.选择开始.程序将开始,模拟将记录,直到程序完成。
4.保存文件。保存文件后,它将自动打开,您可以预览结果。
HTML和PDF模拟保存为一个文件。压缩HTML文件将显著减小其大小。PDF模拟必须用Acrobat Reader(而不是浏览器)打开。
以下链接是导出的示例Web版RoboDK链接:
●导出的RoboDK项目示例:https://web.m.sinclairbody.com/lnk/35303930233736
●打开这个链接//m.sinclairbody.com/example/Assembly-and-Palletizing-with-ABB-and-Fanuc并选择切换3D视图。
●您可以选择任何站点库示例的详细信息,并选择切换3D视图来预览RoboDK中的Web项目。
以下链接是3D HTML模拟的示例:
●//m.sinclairbody.com/simulations/UR-Paint.html
●//m.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.html
●//m.sinclairbody.com/simulations/Robot-Drawing.html
以下链接是3D PDF模拟的示例:
●//m.sinclairbody.com/simulations/UR-Paint.pdf
●//m.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.pdf
●//m.sinclairbody.com/simulations/Milling-with-External-Axes.pdf

您可以将您的RoboDK模拟导出到Blender以创建逼真的图像和动画。Blender是一个免费的开源3D动画和渲染软件。RoboDK提供了在Blender中加载模拟的能力,包括彩色对象和动画序列。
Blender导出选项将在导出模拟窗口中添加Blender导出格式。

要将导出的RoboDK模拟导入到Blender,请遵循以下步骤:
1.打开搅拌器。
2.使用“General”默认模板,并删除包含的对象(多维数据集)。
3.可选地,打开系统控制台窗口➔切换系统控制台
4.导航到脚本视图并打开以" _bpy.py "结尾的Python文件,+➔一般➔脚本➔开放.
5.使用以下命令运行脚本脚本➔运行脚本或Alt + P.
6.等待脚本完成(检查系统控制台的活动)。根据模拟的大小,这个过程可能需要几分钟。

你可以在Blender中微调材料、渲染选项等,以获得最佳效果。RoboDK并没有为此提供专门的教程,但Blender作为一个强大的社区,拥有大量的教程。
要输出Blender渲染,请遵循以下步骤:
1.打开输出属性在侧边栏上。
2.设置分辨率和帧率格式。
3.设置的文件格式FFmpeg在输出.
4.将容器设置为mpeg - 4在编码。
5.设置输出质量为感知无损的而编码速度为最慢的在视频.
6.使用渲染➔渲染动画或CTRL + F12.
7.默认情况下,您的文件将保存在/tmp/中。

模拟速度(或模拟比率)是RoboDK模拟真实运动的速度。模拟比率为1意味着在真实机器人上需要1秒的运动将需要1秒来模拟。
默认情况下,RoboDK的模拟速度比实时快5倍。这意味着一个在真正的机器人上需要5秒才能执行的程序将在1秒内被模拟出来。加速模拟将这个比率提高到100。正常和快速的模拟速度可以在工具中改变➔选项➔运动的菜单.
当您模拟程序时,RoboDK可以提供周期时间估计。周期时间是程序完成所需的时间。RoboDK提供的周期时间的准确性高度依赖于许多因素,包括机器人控制器,机器人运动类型(关节与线性运动),使用舍入以及实际的速度/加速度限制。
在适当的情况下,RoboDK可以准确地计算出周期时间。当您对机器人进行精确的点对点运动(不舍入)并且不超过实际速度和加速度限制时,就会发生这种情况。
机器人的速度和加速度很重要,因为它们与机器人有关。机器人的速度和加速度(线性和关节速度/加速度)必须作为指令或在机器人参数菜单中提供。例如,您可以在程序中使用设定速度指令.RoboDK假设机器人在达到最大速度之前具有均匀加速度,然后均匀减速。
默认情况下,RoboDK对关节运动使用关节速度和关节加速度,对线性运动使用线速度和线性加速度。此设置可在工具➔选项➔运动➔移动时间计算).

你可以在RoboDK中使用change color工具来改变对象的颜色。
按照以下步骤更改机器人的颜色:
1.选择工具➔改变颜色。
2.通过选择3D模型,您将能够看到机器人的实际颜色。
3.选择选择面对在改变颜色窗口,然后选择要更改颜色的面。

8.一旦你选择了面,点击颜色,然后选择一个新的颜色。
通过使用RoboDK的测量工具,您可以测量不同几何特征(如圆柱体和平面)之间的距离,并提取其属性。
选择工具➔测量打开测量工具。然后,您可以在3D窗口中选择几何特征。

您可以在RoboDK中创建新的机制或机器人。
按照以下步骤创建一个新的机器人或机构:
1.选择公用事业公司➔模型的机制或机器人。
2.选择要创建的机构或机器人的类型。
3.选择代表机构原点的坐标系。
4.为每个关节(机构或机器人的运动部分)选择一个对象。
5.输入相应图像中描述的机器人参数。
6.选择Update以查看新机制。
还可以通过右键单击树中的机器人项目并选择来修改现有机制修改的机器人.此选项可用于您自己创建的机器人和机制。

您可以在RoboDK中创建以下类型的机制和机器人:
●一个旋转轴(转盘或夹持器)
●两个旋转轴(例如:2轴定位器)
●一个线性轴(如线性轨道)
●两个线性轴(如T-bot)
●三个线性轴(如H-bot)
●一个线轴+一个旋转轴
●感觉触手
●Scara机器人(4轴)
●六轴机械臂
●七轴机械臂
本节展示如何对单轴转盘进行建模。转盘常用于机器人加工应用。
按照以下步骤创建转盘:
1.加载转盘的3D模型:拖放3D模型到RoboDK窗口(如STL, STEP或IGES文件)。

2.选择公用事业公司➔模型机构或机器人.
3.选择1旋转轴。
4.如果你看一下图像,它应该告诉你应该如何定位的基础和顶板。在旋转轴的情况下,该机构将围绕Fb(框架基座)的Z轴旋转。
5.将机制重命名为转盘。
通过创建一个新的坐标系统来定义转盘的参考:
1.创建一个参考框架,并选择F2将其命名为框架基础。
2.通过打开来修改框架的位置帧面板.
3.选择工具然后测量。
4.点击机构测量表面位置;你可以看到原点和中心的区别。你可以复制值和粘如下图所示。

参考位置现在应该与图像中的参考相匹配。参考框架和对象项应该自动填充。如果自动选择不正确,您可以相应地更新它。
6.您可以更新关节极限,例如,如果我们想要有+/-20转,我们可以进入+/-7200度。您也可以稍后通过双击机器人面板的关节极限标签来更改关节极限。
7.选择更新生成机制:新的机制就会出现。
8.如果需要,您可以选择OK关闭菜单或对转盘添加其他更改。
9.您可以删除用于创建该机制的原始目标文件。该机制将与您的RDK项目一起保存,并且它不需要任何外部依赖项。
10.一旦您测试了您的表(确保它在正确的方向上移动并且限制是您所期望的),您就可以选择OK在模型的机制窗口关闭它。


单轴校准程序准确地放置一个转盘相对于机器人。
本节展示如何建模1轴线性轨道,也称为线轴或线性轨道。线性导轨有助于延长机器人手臂的伸展范围。
按照以下步骤导入3D模型:
1.拖放您的3D模型在RoboDK导入对象到您的工作站(接受的文件格式包括STEP, IGES或STL是常见的3D格式)。
按照以下步骤打开您的机制构建器:
2.选择公用事业公司➔模型机构或机器人。
3.确保1直线轴在“机器人类型”下选择。
4.如果你的3D模型被分成一组,你可以在RoboDK中拆分你的模型。
按照这些步骤来定位你的基础框架:
5.现在已经加载了对象,再次打开模型机制构建器公用事业公司➔模型机构或机器人。
6.您可以将机制重命名为机器人的名字。
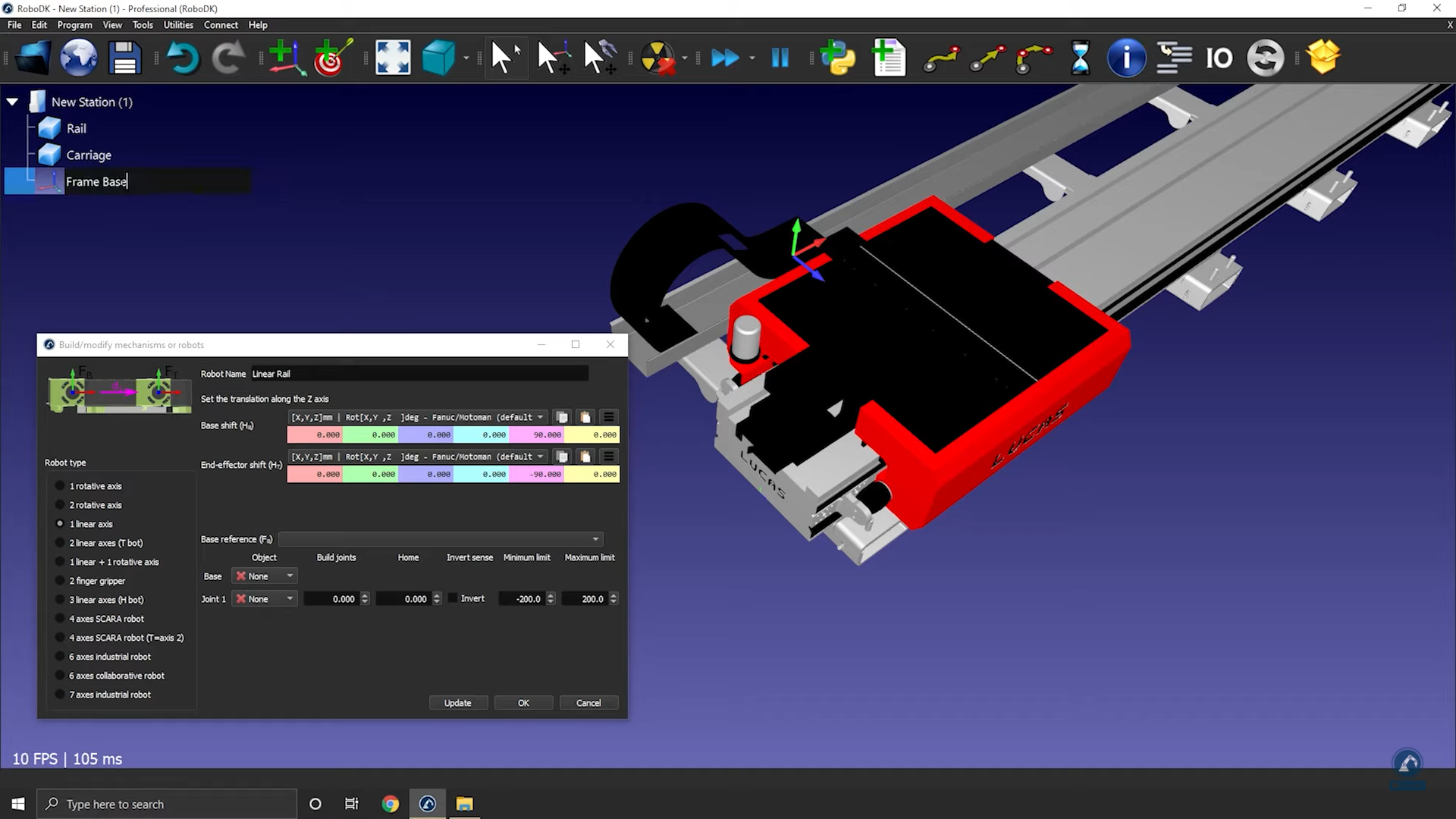
7.考虑你的基础框架应该在轨道的0位置:创建一个参考框架,命名为frame Base。

按照以下步骤修改框架的位置:
8.选择工具➔衡量。
9.使用测量工具通过选择图标来测量表面的位置(如下图所示)。

10.复制值并粘贴到下面框架细节:框架基础(如下图所示)

按照以下步骤检查方向并输入导轨长度:
11.顺时针旋转,绕X旋转90度:在参考位置窗口输入值-90.000度。
12.在模型机制窗口中输入导轨的长度(如下图所示)。

13.选择更新来创造机器人。
14.您可以测试轨道(确保限制是好的,它是在正确的方向上移动)使用关节轴啮合.

15.选择好吧当你对结果满意的时候。
这个例子展示了如何建模一个2轴线性轨道,也被称为线性轴或线性轨道。线性轴用于扩展机器人手臂的伸展。
按照以下步骤在RoboDK中设置您的3D模型:
1.将您的3D模型导入RoboDK➔拖放STEP文件进入你的位置。
2.打开机制构建器:公用事业公司➔模型机构或机器人。
3.在“机器人类型”下选择2-线轴(T-bot)。

4.一旦你的模型被分成3个部分,重新打开轨道生成器:选择公用事业公司➔模型机构或机器人。
5.选择选项:2-线轴(T-bot)。
6.将机器人重命名为T-bot(以机器人的名字)。
按照以下步骤找到您的基础框架的位置:
7.如果您认为您的基础框架应该在轨道的0位置,创建您的参考框架正好在那里,并将其重命名为框架基础.

按照以下步骤修改框架的位置:
8.打开框架面板双击框架.
9.打开测量工具测量表面中心的位置:工具➔衡量。
10.选择每条边的中心点(如下图所示)来求两条线之间的距离。

11.选择创建几何在测量窗口,将在两点之间创建一条线。
12.选择明确的选择。
按照以下步骤测量两条线之间中心点的位置:
13.选择线的中心点。
14.复制值在测量窗口,粘贴值作为框架位置(如下图所示)。

遵循以下步骤确保方向相同:
15.绕X逆时针旋转90度,然后绕Z轴旋转90度(如下所示)。

16.输入测量值在“模型机构或机器人”窗口中选择导轨,如下图所示。

17.选择更新来创造机器人。
18.如果您对结果满意,请选择好吧在“模型机构或机器人”窗口中。
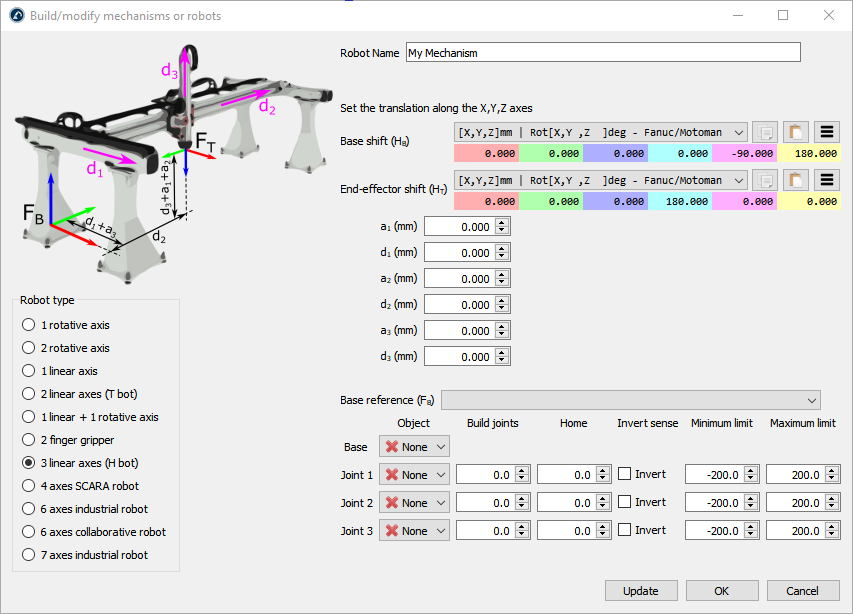
下面的视频展示了如何建模一个3轴直角坐标系机器人(H-bot)。机械臂可以安装在外部轴上,以扩大其触及范围。
按照以下步骤在RoboDK中设置您的3D模型:
1.在RoboDK中拖放3D模型(如STEP或IGES文件)以将其加载到您的工作站。
2.打开机制构建器:选择公用事业公司➔模型机构或机器人.
3.下机器人类型中,选择三线轴(H-bot).

按照以下步骤创建基本框架:
4.一旦你的对象被分成不同的部分,重新打开轨道构建器(选择公用事业公司➔模型机构或机器人➔3-linear轴).
5.将机器人重命名为机器人的名字.
6.在轨道的0位置创建一个参考系。可以将其重命名为框架基础.

按照以下步骤修改框架的位置:
7.打开框架面板双击“Frame Base”.
8.打开测量工具:工具➔测量.
9.选择下面突出显示的图标在测量工具,然后选择对象的两条边求两个中心点之间的距离。

10.选择创建几何在两个中心点之间创建一条线。
11.现在两点之间的线已经创建好了,您可以选择了明确的选择。
12.选择线的中心查找新创建的直线的中心点的测量值。
13.复制这些值并将其粘贴为帧位置(如下图所示),以确保帧位置与参考图像匹配。

遵循以下步骤确保方向相同:
14.旋转90度逆时针方向。
15.选择框架基础然后选择轨道3D模型(逐一选择每个部分),如下图所示。

16.在测量部分输入每个钢轨的长度。
17.移动下面的每个轴关节轴啮合确保每个轴都能正常移动。

18.新闻更新在测试了每个轴之后创建你的机器人。
19.如果你对结果满意,你可以按Ok在模型机制窗口上。
您可以在RoboDK中使用模型机构或机器人工具对平行夹持器进行建模。平行夹持器也被称为两指夹持器,它允许机器人抓取零件。
按照以下步骤在RoboDK中设置您的3D模型:
1.导入您的3D模型:拖放STEP文件将其加载到您的站点(也可以使用IGES或STL文件)。
2.打开机制生成器:公用事业公司➔模型机构或机器人.
3.选择2手指夹在“机器人类型”下。
4.你可以重命名你的机器人“爪”。

按照这些步骤来定位你的基础框架:
5.创建一个参考框架(它应该在夹具下面),并将其重命名为框架基础.
6.确保你刚刚创建的框架是根据图像定位的:将参考框架移至0.000 mm (X,Y,Z)。

7.进入抓手的运动范围如果你把手指放在0的位置,最小限位是0,最大限位是80。
8.选择更新。
9.确保它在正确的方向上移动,并且通过使用关节轴啮合.
10.如果你对结果满意,你可以按好的。
这个例子展示了如何使用制造商提供的3D模型从零开始建模一个6轴工业机器人手臂。世界杯2022美洲预选赛直播
按照以下步骤收集机器人的一些信息:
1.首先,您需要3D模型(例如STEP或IGES文件)。
2.您还需要机器人数据表或机器人手册。
按照以下步骤在RoboDK中打开机器人模型窗口:
3.选择公用事业公司➔模型机构或机器人.
4.下机器人类型中,选择六轴工业机器人世界杯2022美洲预选赛直播.

通过以下操作将机器人3D文件加载到RoboDK:
5.拖放你的机器人进入RoboDK或选择文件然后开放(加载可能需要几秒钟)。
按照以下步骤将一个对象分成不同的部分,这样我们就可以单独处理每个部分:
6.如果您下载的CAD文件是在一个单一的对象,您可以取2022世界杯国家队名单消分组的对象(STEP文件)右键单击任何对象并选择分割对象.

7.然后,您可以重新组合它,以创建机器人的不同部分。
按照以下步骤在RoboDK中输入机器人运动学信息:
8.输入你的机器人的名字机器人的名字.
9.如果机器人的各个部件的顺序正确,那么所有的3D模型都应该被正确填充。否则,您可以手动将每个对象链接到正确的机器人关节。
10.填入机器人的尺寸打开数据表.
11.在数据表的3D草图上,您将找到您正在寻找的所有值。在RoboDK中填写正确的值。

12.一旦您对机器人的运动学结果感到满意,选择更新.
可以使机械臂与附加的外轴同步。外轴可以简单地用作定位器,也可以与同一机器人控制器同步。当外部轴同步时,机器人和轴可以同时运动,同时保持相对于坐标系的精确线性运动。
您可以同步多达6个额外的轴与任何机器人使用RoboDK。如果你使用的是6轴机器人,这意味着你可以有一个12轴的组合系统。
使机械臂与外轴同步:
1.加载额外的轴从我们的库或把它当作一种新机制来模拟.
2.建立一个RoboDK站,将机器人和轴/机构放置在他们的位置。
3.选择公用事业公司➔同步外部轴。
4.选择机器人,可用的转台和/或线性轨道将与机器人同步。
5.选择OK。将打开一个新的机器人面板,以蓝色显示额外的轴。
与此同步机器人相关的目标将以蓝色显示额外的关节值。在生成程序时,可以指定定位器的首选位置。当外轴沿着路径移动时,笛卡尔目标将保持给定的笛卡尔位置。
任何机器人加工设置将显示额外的选项,以提供外部轴的首选位置。此外,通过后置处理器导出的每个运动将包括外部轴的位置。

当你有一个或多个额外的轴与你的机器人同步时,你可以优先移动某些轴并优化你的机器人加工项目,曲线/点跟踪项目和3D打印项目,根据您的喜好标准。
选择更多的选择在轴的优化节中您的机器人加工项目,以查看外部轴的优化选项。

您可以根据以下标准提供不同的优先级:
●维护参考关节:您可以为某些(或所有)关节施加所需的轴位置。权重越高,意味着它在程序中的任何时候都更有可能与参考值匹配。
●最小化运动(匹配之前的位置):你可以对突然移动某些轴施加“惩罚”(相对运动)。
●保持参考姿势:你可以强加一个想要保持的绝对机器人姿势。参考位姿是你想要保持的机器人法兰相对于静态机器人基座的位姿。方向约束将尝试根据参考位姿匹配机器人法兰位姿的X, Y, Z向量。
例如,如果选择保持法兰方向预设,RoboDK将优先保持机器人法兰的方向,以匹配您在模拟中选择此预设时的机器人姿势(选择此预设会更新参考姿势)。此外,如果您希望机器人关节1值保持在105度附近,您可以激活此优先级。
如果选择保持机器人参考预设后,您将看到位置参考被更新以匹配机器人轴的当前位置。您还将看到机器人关节具有一定的重量(100),而外部轴没有重量(没有优先级)。另一方面,外轴将有一个小的重量(5),以防止他们做突然或不希望的运动。
您可以在更新机器人加工项目后更改这些设置以获得所需的效果。