Per iniziare
Questo documento mostra un esempio di come preparare una stazione offline semplice in RoboDK per la programmazione offline di robot. In questo esempio un robot UR è simulato e programmato per un programma di verniciatura.
Tutte le impostazioni di un progetto RoboDK sono salvate come Stazione RoboDK (file RDK). Una stazione RoboDK contiene tutti i robot, tool, piani di riferimento, oggetti e altri parametri. La stazione RoboDK è salvata in un file (con estensione RDK). Non è necessario mantenere una copia separata dei file robot, tool e oggetti siccome sono salvati in un file RDK.
I video sono disponibili nella sezione esempi del sito RoboDK e forniscono una panoramica su come usare RoboDK per applicazioni differenti://m.sinclairbody.com/examples.
Segui questi passaggi per creare un nuovo progetto RoboDK (stazione RDK):
1.Scarica ed installa RoboDK dal sito web://m.sinclairbody.com/download
2.Fai doppio click sulla scorciatoia sul desktop
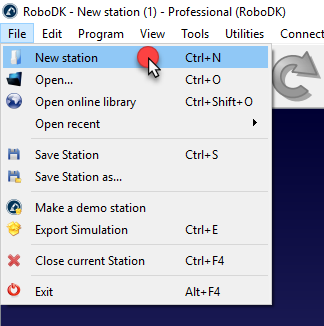
3.Se altre stazioni sono aperte:
selezionaFile➔![]() Nuova stazione (Ctrl+N)per iniziare un nuovo progetto.
Nuova stazione (Ctrl+N)per iniziare un nuovo progetto.
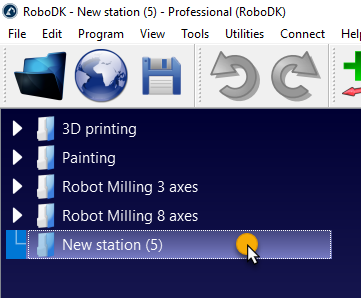
Più di un progetto RoboDK può essere aperto nello stesso momento. Fare doppio click nell'icona della stazione![]() nell'albero attiverà e visualizzerà quel progetto
nell'albero attiverà e visualizzerà quel progetto
Nuovi robot possono essere aggiunti da un file locale o dalla libreria online:
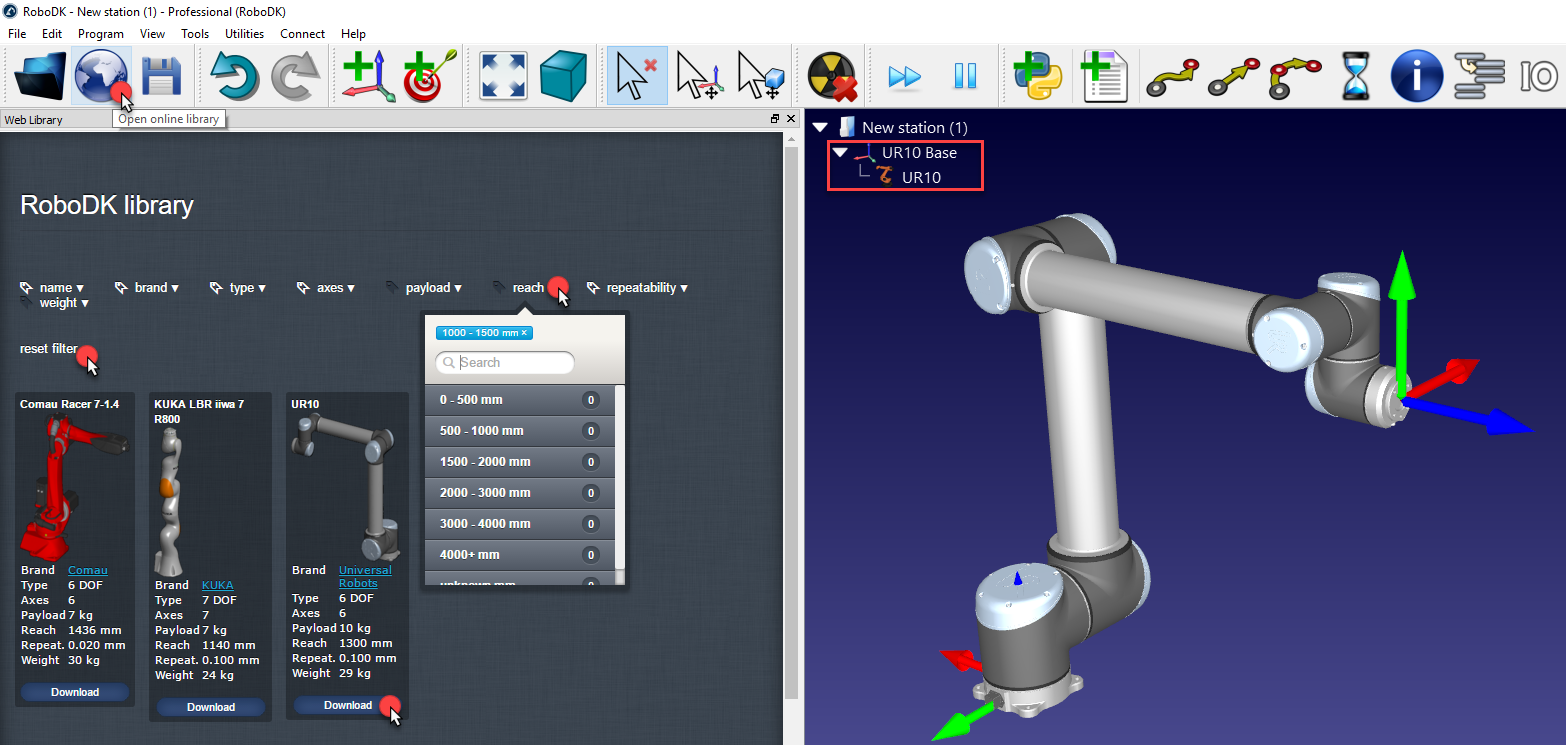
1.SelezionaFile➔![]() Apri libreria online(Ctrl+Shift+O). Verrà visualizzata una nuova finestra che mostrerà la libreria online. È anche possibile selezionare il pulsante corrispondente nella toolbar.
Apri libreria online(Ctrl+Shift+O). Verrà visualizzata una nuova finestra che mostrerà la libreria online. È anche possibile selezionare il pulsante corrispondente nella toolbar.![]()
2.Utilizza i filtri per trovare il tuo robot dal produttore, payload, ...
In questo esempio, useremo un robot UR10 (payload di 10 kg e sbraccio di 1.3m)
3.SelezionaDownload.Il robot apparirà automaticamente nella stazione dopo alcuni secondi.
4.La libreria online può essere chiusa una volta che il robot è stato caricato
Un piano di riferimento permette di posizionare oggetti con rispetto di un robot o con rispetto gli uni degli altri nello spazio 3D (includendo posizione ed orientamento).
Per aggiungere un nuovo piano di riferimento:
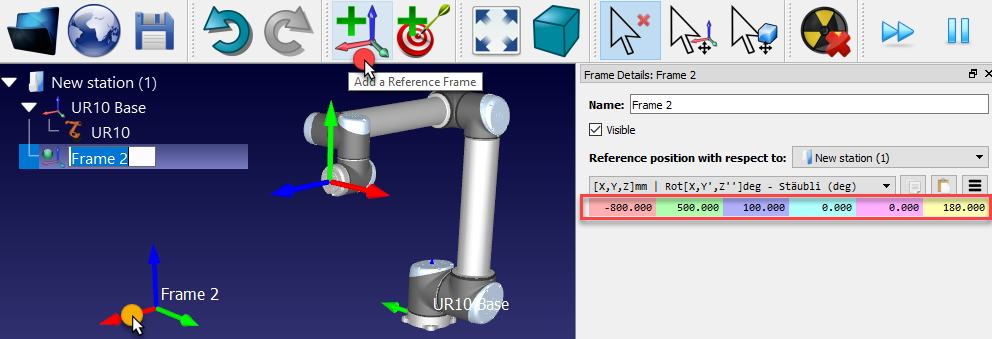
SelezionaPrograma➔![]() Aggiungi Piano di Riferimento
Aggiungi Piano di Riferimento
In alternativa, seleziona il pulsante equivalente nella toolbar.
1.Fai doppio click sul piano di riferimento (nell'albero o sulla geometria 3D nella finestra principale) per inserire le coordinate mostrate nell'immagine (X,Y,Z per posizione e angoli di Eulero per orientamento). La rotella del mouse può essere utilizzata sopra ogni casella per aggiornare la posizione del piano di riferimento nella finestra principale.
I seguenti colori sono utilizzati di default:
●coordinata X➔Rosso
●coordinata Y➔Verder
●coordinata Z➔Blu
●primo angolo di Eulero➔Ciano
●secondo angolo di Eulero➔Magenta
●terzo angolo di Eulero➔Giallo
2.SelezionaVisualizza➔Ingrandisci piani di riferimento (+)per ingrandire la dimensione dei piani di riferimento
3.SelezionaVisualizza➔Rimpicciolisci piani di riferimento (-)per rimpicciolire la dimensione dei piani di riferimento
4.SelezioneVisualizza➔Mostra/Nascondi testo sullo schermo (/)per mostrare o nascondere il testo sullo schermo
5.opzione, rinomina ciascunpiano di riferimento o oggetto nell'albero selezionandoF2
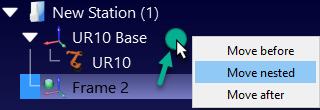
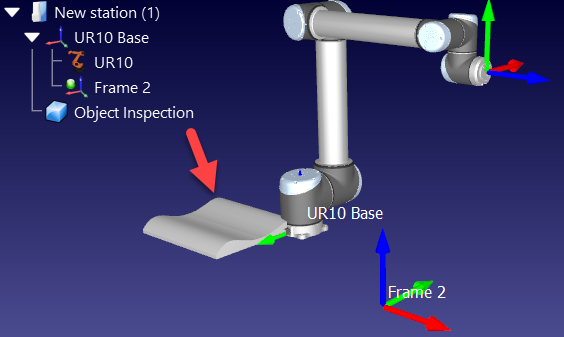
Se più di un piano di riferimento è utilizzato, è possibile trascinarlo all'interno dell'albero della stazione per far corrispondere la relazione che esiste nel setup reale. Ad esempio, il piano di riferimento Frame 2 può essere posizionato con rispetto della base del robot. In quel caso, se la base dell'UR10 viene spostata, Frame 2 è anch'esso spostato con esso. È importante considerare ciò se altri robot o piani di riferimento sono utilizzati. La prossima immagine mostra la differenza nelle relazioni.
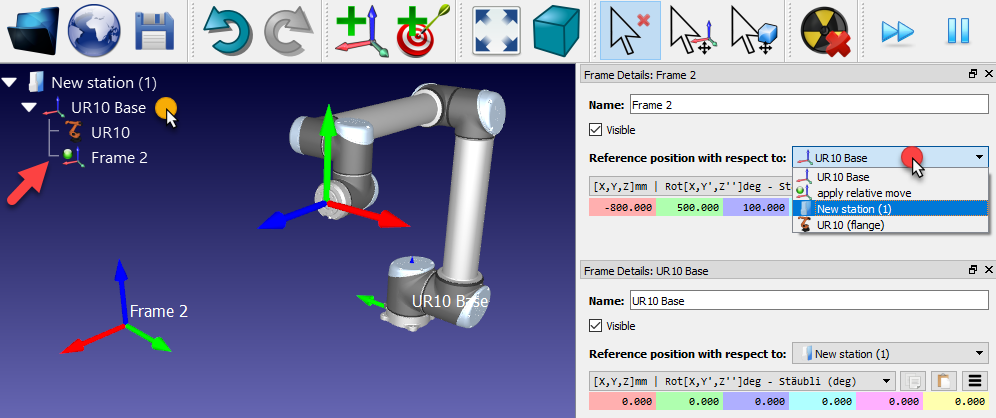
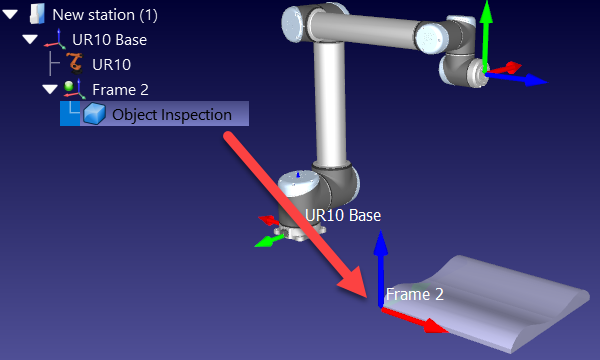
Anche se la relazione è diversa, è possibile inserire o recuperare le coordinate di ogni piano di riferimento con rispetto di altri, come mostrato nella prossima immagine. Molti controllori robot necessitano di coordinate del piano di riferimento con rispetto della base.
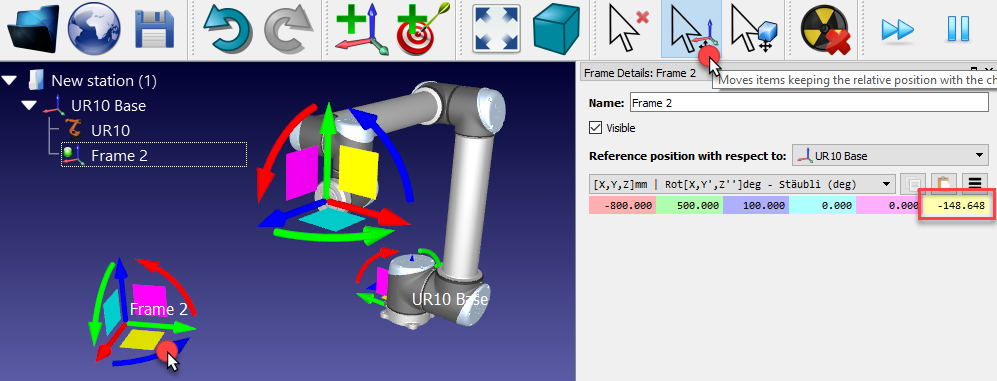
Piani di riferimento possono anche essere spostati nella finestra principale tenendo premutoAlt, o selezionando il pulsante corrispondente nelle toolbar![]() . Poi, trascinare il piano di riferimento col mouse sullo schermo. Come il piano viene spostato, le coordinate si aggiorneranno.
. Poi, trascinare il piano di riferimento col mouse sullo schermo. Come il piano viene spostato, le coordinate si aggiorneranno.
RoboDK supporta i più comuni standard di formati 3D come STL, STEP (o STP) e IGES (o IGS). Altri formati come WRML, 3DS o OBJ sono anch'essi supportati (STEP e IGES non sono supportati su Mac e Linux) Per caricare un nuovo file 3D:
1.SelezioneFile➔![]() Apri
Apri
2.Seleziona l'oggettoIspezione Oggettodisponibile nella libreria di default di RoboDK:
C:/RoboDK/Library/Object Inspection.
6.In alternativa, trascina i file nella finestra principale di RoboDK per importarli automaticamente
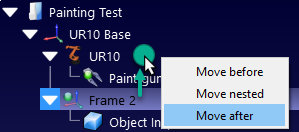
7.Trascina l'oggetto sul piano di riferimentoFrame 2(nell'albero della stazione)
Nuovi tool possono essere creati in RoboDK da file 3D precedentemente caricati:
1.SelezionaFile➔![]() Apri(come descritto nellaprecedentesezione)
Apri(come descritto nellaprecedentesezione)
2.Seleziona il file Paint gun.stl per aggiungerlo come oggetto (sarà aggiunto al piano di riferimento della base)
3.Trascina l'oggetto sul robot della stazione come mostrato nella seguente immagine.
Nuovi tool possono essere caricati o salvati come formati .tool

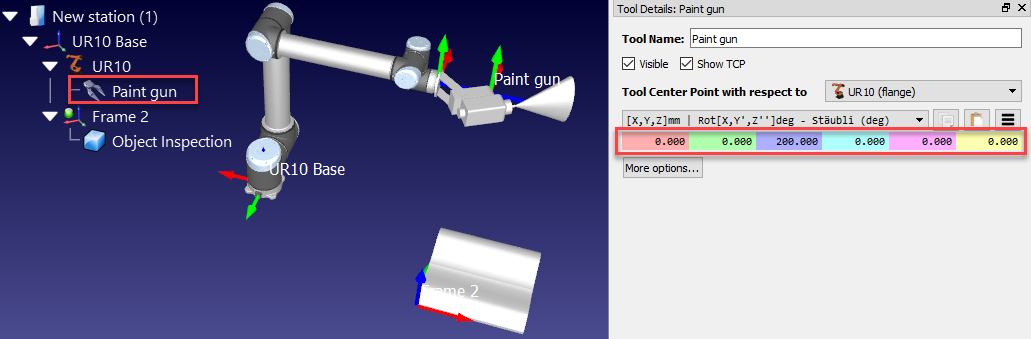
Di default, RoboDK definirà il TCP alla posizione[X,Y,Z]=[0,0,200] mm. Questo può essere cambiato immettendo le coordinate manualmente e/o muovendo il TCP tenendo premuto ALT+Shift come mostrato nella seguente immagine:
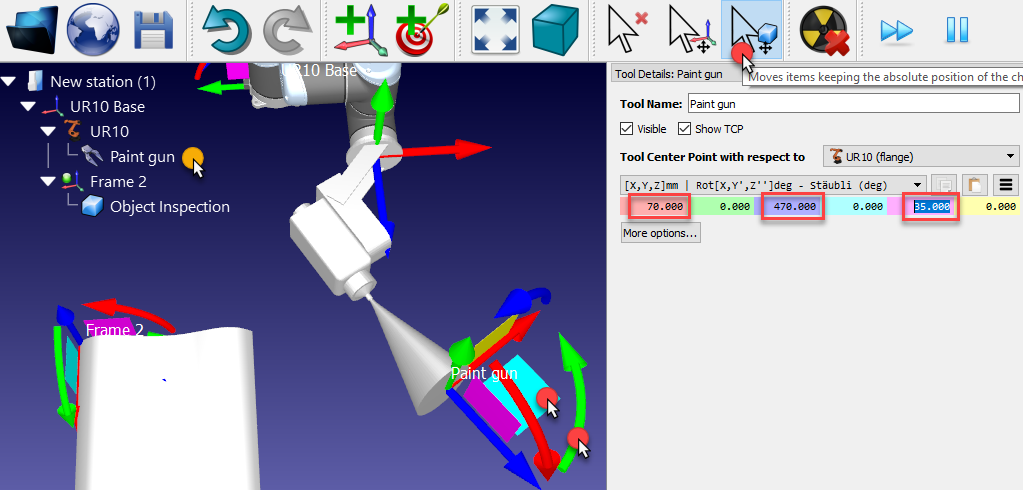
1.Tieni premutoALT+Shifto seleziona il pulsante evidenziato dalla toolbar
2.Seleziona il piano azzurro (piano XZ del TCP) e trascina il TCP approssimatamente verso la superfice dello spray gun, come mostrato nella seguente immagine
3.Seleziona la freccia Verde (rotazione attorno all'asse Y) in modo che l'asse Z punti verso l'esterno
4.Una volta che una stima delle coordinate è stata ottenuta, è possibile modificare questi valori manualmente facendo doppio click sull'oggetto Paint gun. La rotella del mouse può essere usata sopra ogni casella per aggiornare automaticamente la posizione sulla finestra principale.
A questo punto la stazione può essere salvata:
1.SelezionaFile➔![]() Salva Stazione(Ctrl+S)
Salva Stazione(Ctrl+S)
2.Salva il file come Paint Test.rdk. Il titolo della finestra e il nome della stazione saranno aggiornati
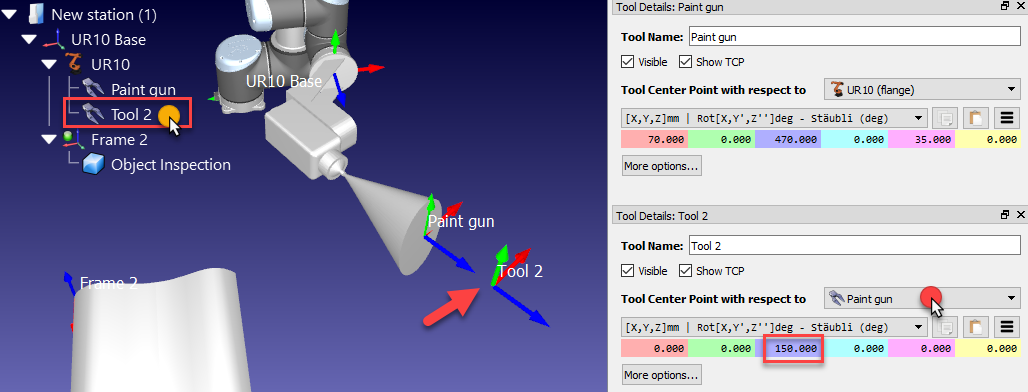
È possibile posizionare un secondo TCP con rispetto del primo, ad esempio, per definire un distanziale o per posizionare un cutter con rispetto di un TCP
Questi passaggi presuppongono un secondo TCP aggiunto con rispetto del primo a 150mm lungo l'asse Z:
1.Clicca con il tasto destro sul robot
2.Seleziona![]() Aggiungi Tool (TCP).联合国诺沃oggetto 2维拉visualizzat chiamato工具o.
Aggiungi Tool (TCP).联合国诺沃oggetto 2维拉visualizzat chiamato工具o.
3.Fai doppio click nel nuovo TCP
4.SelezionaTCP con rispetto di➔Paint gun
5.Immetti la coordinata Z a 150 mm e imposta le altre traslazioni e rotazioni a 0.
Questo nuovo TCP relativo a quello precedentemente definito verrà rimosso nelle prossime sezione di questa dimostrazione.
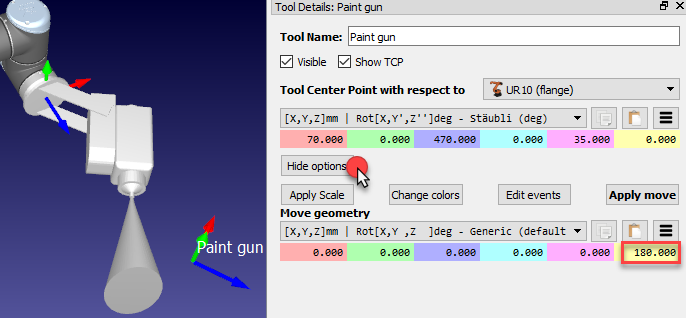
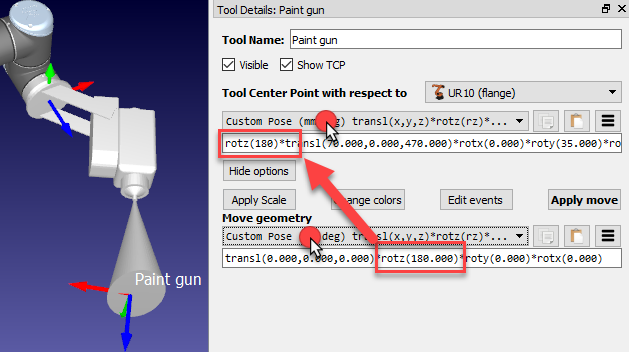
年青一代拉geometria del工具非essere allineata软木retamente con rispetto della flangia del robot (adattatore del piano di riferimento) quando è caricato in RoboDK. I seguenti passaggi presuppongono che un errore sia compiuto e che il tool sia montato a 180 gradi attorno all'asse Z, quindi le seguenti correzioni devono essere applicate:
1.Seleziona Più opzioni nella finestra dettagli
2.Inserisci 180 nella casella gialla (rotazione Z) della geometria della paint gun, come mostrato nella seguente immagine.
La rotella del鼠标può essere usata sopra ogni casella per aggiornare velocemente la posizione sulla finestra principale.
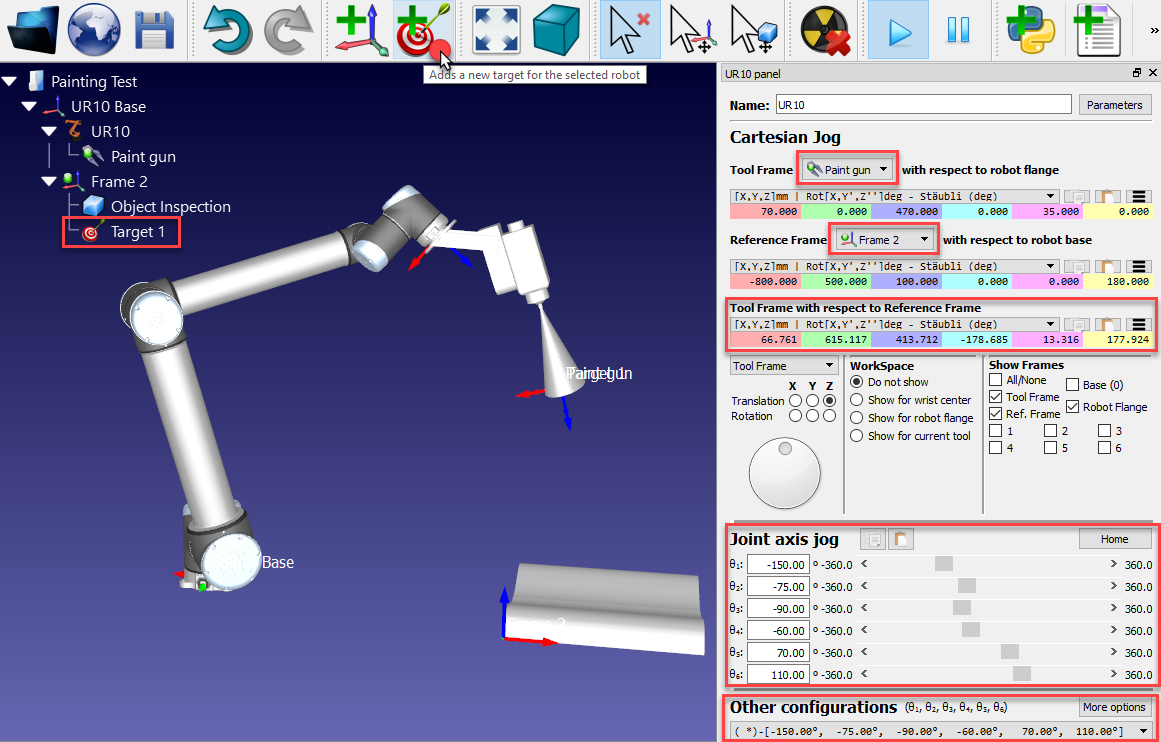
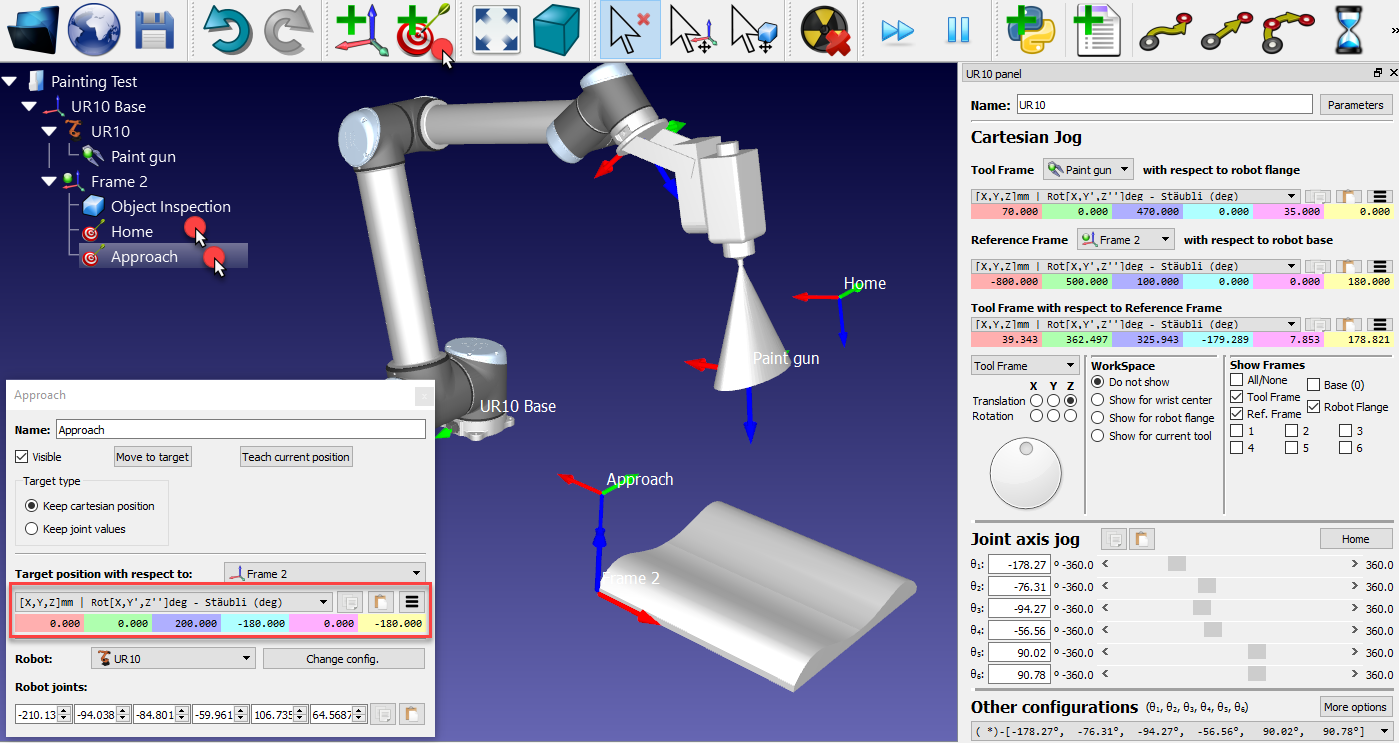
Le posizioni del robot sono registrate come Bersagli. Segui questi passi per creare due bersagli come un nuovo bersaglio Home e un bersaglio approcio:
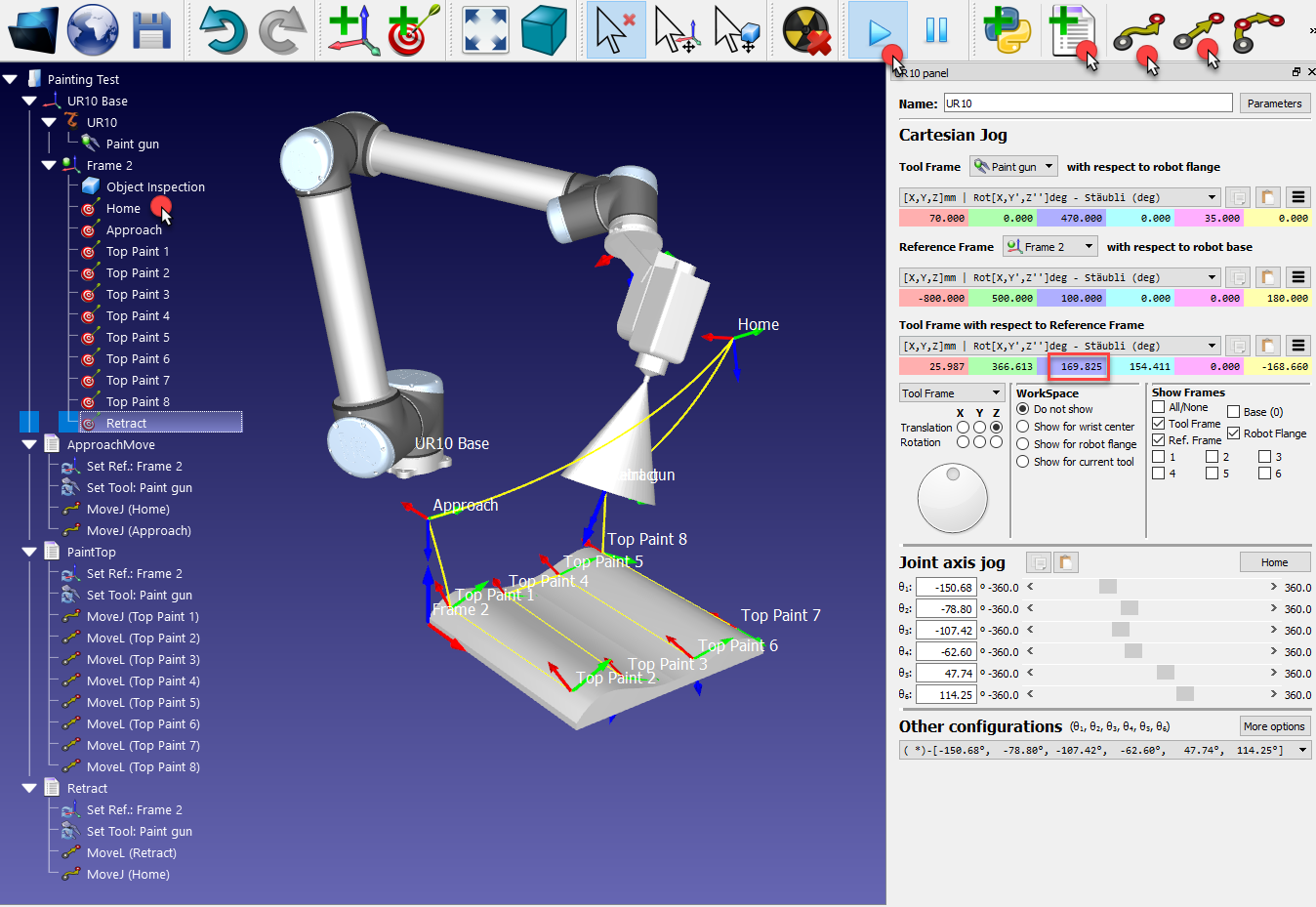
1.Fai doppio click sul robot per mostrare il pannello del robot
2.Seleziona Paint gun come Frame del Tool. Una volta che un tool o un piano di riferimento diventano attivi mostreranno un pallino verde.
3.Seleziona Frame 2 come Piano di Riferimento
4.Tieni premutoAlte sposta il robot trascinandolo per il TCP o la flangia del robot in una posizione di sicurezza, senza collisioni con alcun'oggetto. In alternativa, muovere le coordinate del TCP con rispetto del piano di riferimento.
5.Utilizza la sezioneAltre configurazioniper cambiare la configurazione del robot in modo da essere sicuri non sia troppo vicino ad un limite asse.
6.SelezionaProgramma➔![]() Insegna Bersaglio(Ctrl+T), oppure il pulsante corrispondente nella toolbar (come mostrato nell'immagine). Il bersaglio sarà posizionato come dipendenza del piano di riferimento attivo e ricorderà automaticamente la posizione corrente del robot (cartesiano e assi).
Insegna Bersaglio(Ctrl+T), oppure il pulsante corrispondente nella toolbar (come mostrato nell'immagine). Il bersaglio sarà posizionato come dipendenza del piano di riferimento attivo e ricorderà automaticamente la posizione corrente del robot (cartesiano e assi).
In questo esempio, le coordinate giunti del robot utilizzate per il primo bersaglio sono: [-150, -75, -90, -60, 70, 110] gradi. Questi valori possono essere copiati come testi e![]() incollati comejog giunti assiutilizzando il pannello robot.
incollati comejog giunti assiutilizzando il pannello robot.
7.Rinomina il primo bersaglio comeHomepremendoF2.In alternativa, selezionaStrumenti➔Rinomina oggetto
8.Sposta il robot vicino ad un lato della parte (trascinando il tool utilizzando il tasto Alt, immettendo le coordinate o muovendo gli assi manualmente)
In questo esempio utlizziamo i seguenti valori dei giunti [0,0,200,180,0,180] gradi.
9.SelezionaProgramma➔![]() Insegna Bersaglio(Ctrl+T) o il pulsante corrispondente nella toolbar per creare un nuovo bersaglio
Insegna Bersaglio(Ctrl+T) o il pulsante corrispondente nella toolbar per creare un nuovo bersaglio
10.Rinomina il bersaglio inApprociocome mostrato nel passaggio 7
11.Seleziona il bersaglio Home e il bersaglio Approcio alternandoli per vedere il robot muoversi tra i due bersagli
12.Clicca con il tasto destro il bersaglio e selezionaInsegna Posizione Attuale(Alt+doppio click) se bisogna registrare una posizione diversa per uno dei bersagli
13.Clicca con il tasto destro il bersaglio e seleziona![]() Opzioni Bersaglio...(F3) per aprire la finestra opzioni bersaglio mostrata nella prossima immagine
Opzioni Bersaglio...(F3) per aprire la finestra opzioni bersaglio mostrata nella prossima immagine
Se richiesto, fornire diversi valori per definire i bersagli.
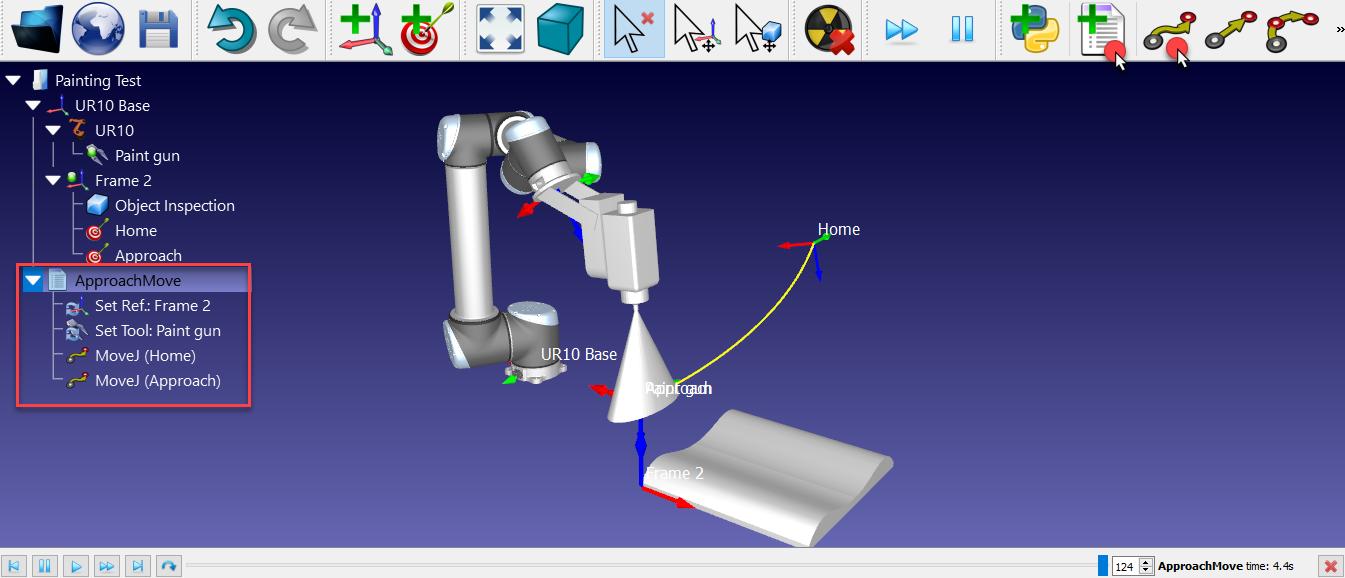
Segui questi passi per creare un programma per spostarsi dal bersaglioHomeal bersaglioApprocio:
1.SelezionaProgramma➔![]() Aggiungi Programmadal menù o dal pulsante corrispondente nella toolbar (come mostrato nella prossima immagine)
Aggiungi Programmadal menù o dal pulsante corrispondente nella toolbar (come mostrato nella prossima immagine)
2.Rinomina il programma inApproachMove
3.Seleziona il bersaglioHome
4.SelezionaProgramma➔![]() Sposta Giunti(o il pulsante corrispondente nella toolbar)
Sposta Giunti(o il pulsante corrispondente nella toolbar)
Due istruzioni saranno aggiunte automaticamente per indicare al robot che tool e piano di riferimento stiamo utilizzando
5.Seleziona il bersaglioApprocio
6.SelezionaProgramma➔![]() Sposta giuntiancora una volta
Sposta giuntiancora una volta
Fai doppio click sul programmaApproachMovee verrà eseguita la simulazione del programma. La barra della simulazione ed una stima del tempo ciclo compariranno.
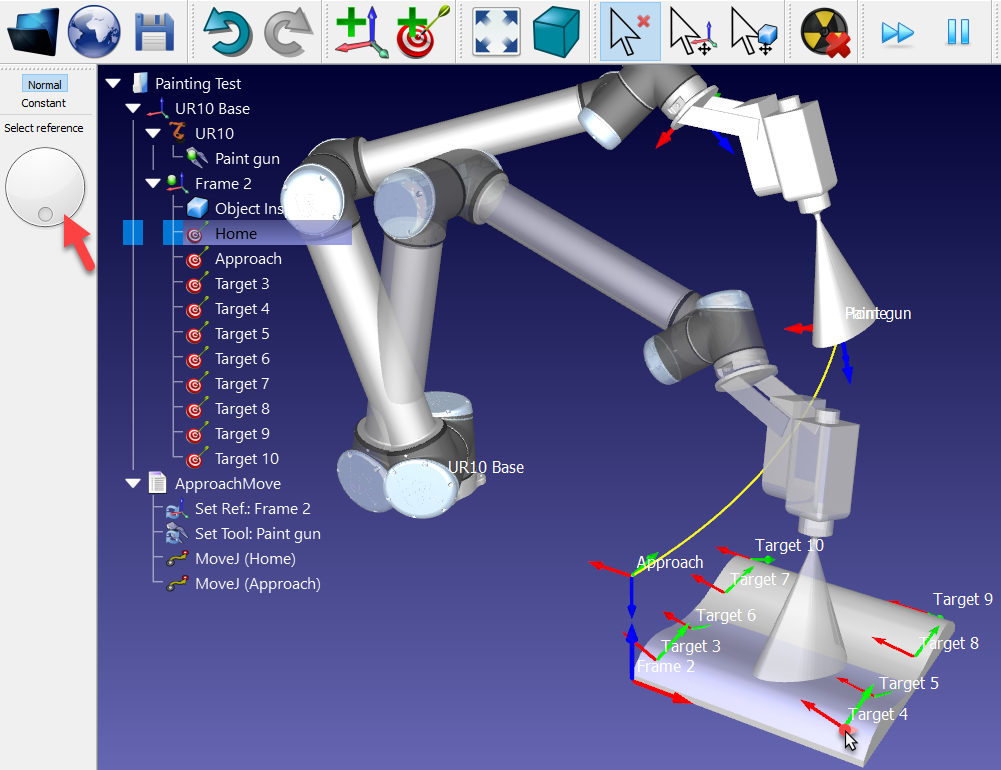
La caratteristica Crea Bersagli su Superficie è utile per applicazioni come la verniciatura o l'ispezione.
1.SelezionaProgramma➔![]() Insegna Bersaglio su Superficie(Ctrl+Shift+T)
Insegna Bersaglio su Superficie(Ctrl+Shift+T)
2.Muovi il cursore del mouse sopra la parte per vedere un'anteprima di come il robot apparirà quando raggiunge la parte
3.Seleziona alcuni punti sull'oggetto (tasto sinistro). Ogni click del mouse definisce un nuovo bersaglio avente l'asse Z normale alla superficie (perpendicolare alla superficie)
4.Se necessario, modificare l'orientamento attorno all'asse Z muovendo la rotella del pannello sulla sinistra o premendo i tasti sinistra/destra.
5.Tieni premutoAltper muovere un bersaglio esistente
6.Tieni premutoAlt+Shiftper muovere un bersaglio esistente mantenendolo sulla superficie
7.Seleziona il tasto Esc o clicca con il tasto destro sullo schermo e selezionaFattoper uscire dalla modalità Creazione Bersagli su Superficie
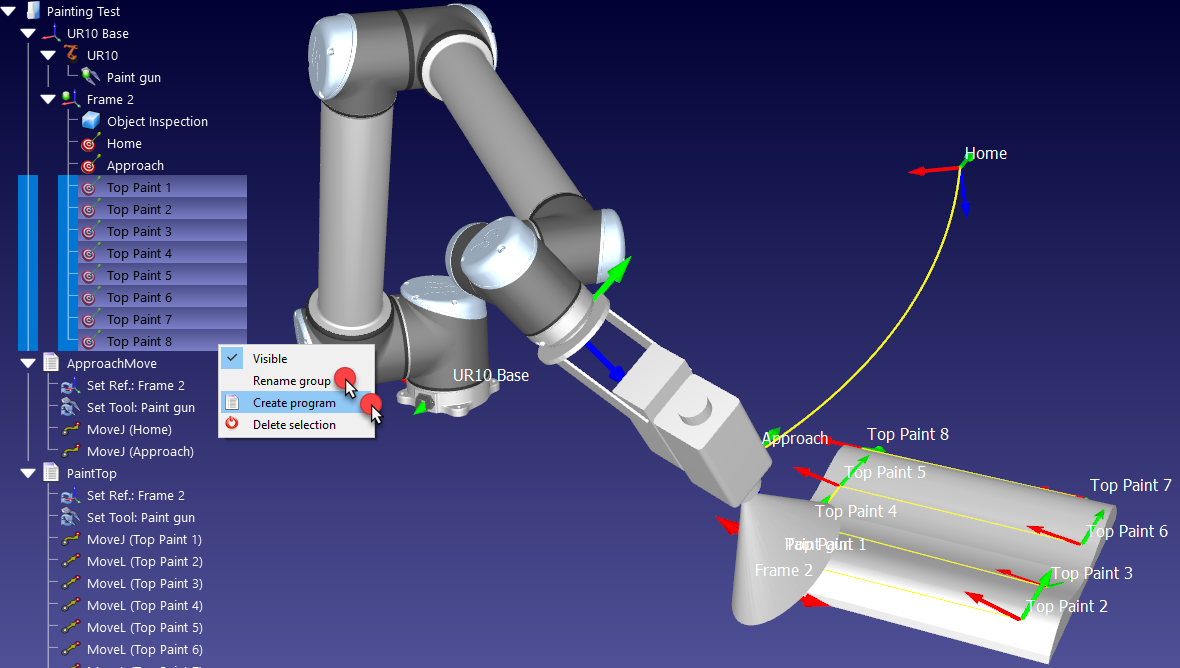
Una volta che i bersagli sono stati creati, generare un programma seguendo questi passaggi:
1.Seleziona tutti i bersagli creati sulla superficie e clicca con il tasto destro
2.SelezionaRinomina gruppodal menu pop-up
3.ImmettiTop Paint.Tutti i bersagli selezionati saranno rinominati e rinumerati
4.Clicca con il tasto destro sui tracciati di nuovo e selezionaCrea Programma. Un nuovo programma sarà generato. Il primo movimento sarà un movimento Giunti e i seguenti saranno Lineari
5.SelezionaF2per rinominare il programma inPaintTop
6.Fai doppio click suPaintTopper vedere una simulazione muoversi lungo i bersagli
7.Se richiesto, riordina i movimenti trascinando l'istruzione all'interno del programma
In maniera simile alle precedenti operazioni:
1.Con il robot posizionato su l'ultimo bersaglio, muovere il robot verso l'alto aumentando la coordinata Z del TCP con rispetto del piano di riferimento nel pannello robot (evidenziato nella prossima immagine)
2.SelezionaProgramma➔![]() Aggiungi Programma, oppure utilzza il pulsante nella toolbar.
Aggiungi Programma, oppure utilzza il pulsante nella toolbar.
3.SelezionaProgramma➔![]() Sposta Lineare, oppure utilizza il pulsante nella toolbar
Sposta Lineare, oppure utilizza il pulsante nella toolbar![]() . Rinominalo inRitraipremendoF2
. Rinominalo inRitraipremendoF2
4.Seleziona in bersaglioHome
5.SelezionaProgramma➔![]() Sposta Giunti.Una nuova istruzione di movimento sarà aggiunta, collegata al bersaglio Home.
Sposta Giunti.Una nuova istruzione di movimento sarà aggiunta, collegata al bersaglio Home.
Simula ogni programma individualmente facendo doppio click. La simulazione può essere accellerata tenendo premuto la barra spaziatrice o selezionando il pulsante Simulazione Veloce![]() /
/![]() .
.
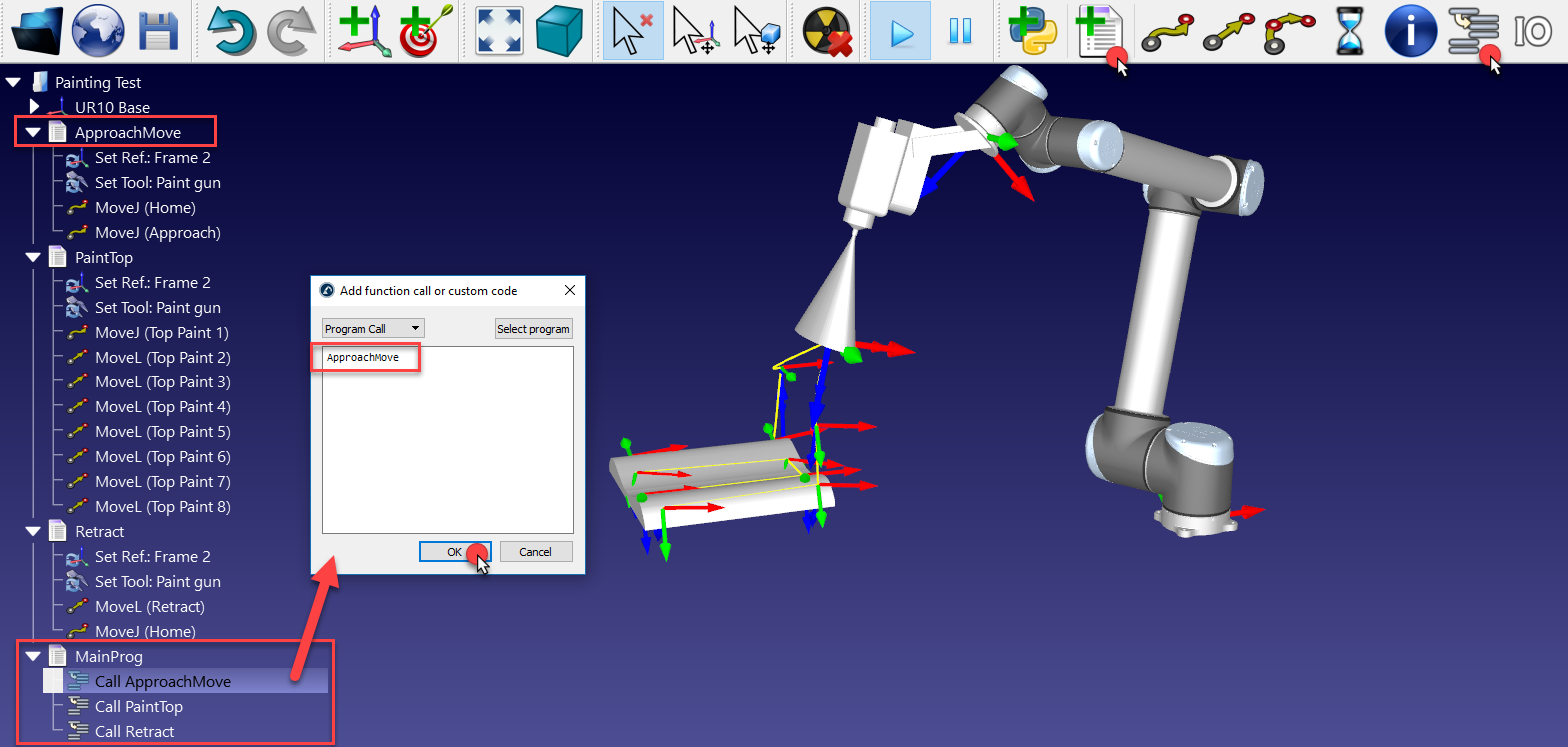
Un programma main può eseguire i programmi approcio, verniciatura e ritrazione in sequenza:
1.SelezionaProgramma➔![]() Aggiungi Programma
Aggiungi Programma
2.SelezionaProgramma➔![]() Chiamata Programma
Chiamata Programma
3.Inserisci il nomeApproachMoveo seleziona Seleziona programma per selezionarlo automaticamente
4.SelezionaOK
5.Ripeti gli ste precedenti perPaintTopeRetractcome mostrato nella prossima immagine
Fai doppio click sul programma Main per eseguire la simulazione completa. Fai click con il tasto destro sul programma Main e selezionaLoopper simularlo in loop.
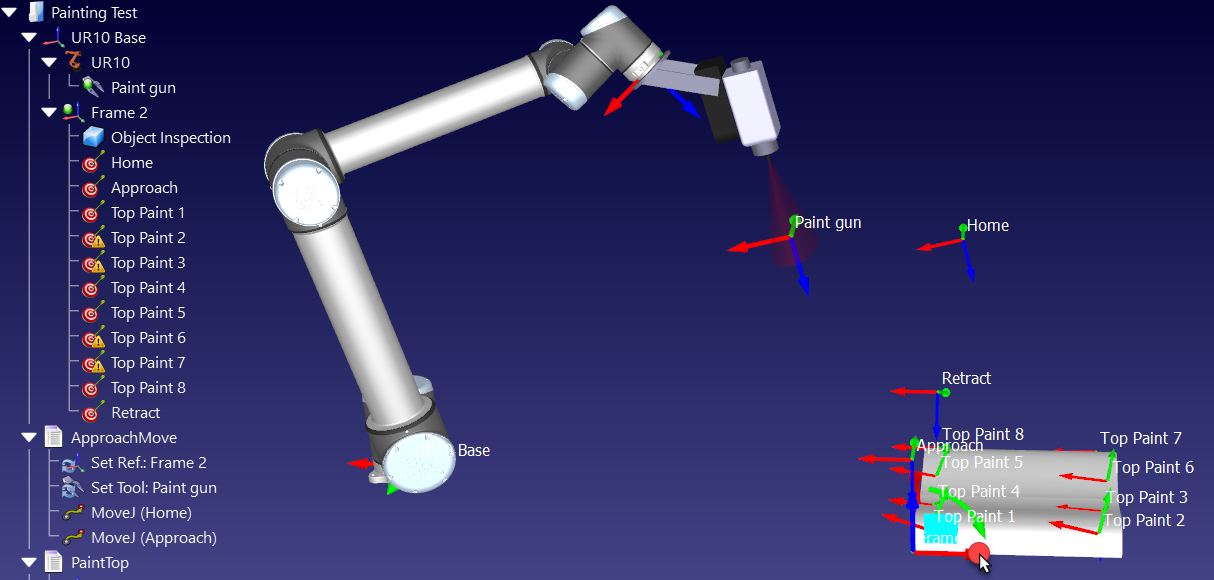
Se il piano di riferimentoFrame 2viene spostato (ad esempio, tenendo premuto il tasto Alt e trascinando l'asse X/rosso del piano di riferimento), l'oggetto e il bersaglio lo seguiranno. Se i bersagli diventano non raggiungibili, verrà visualizzato un piccolo segnale di warning![]()
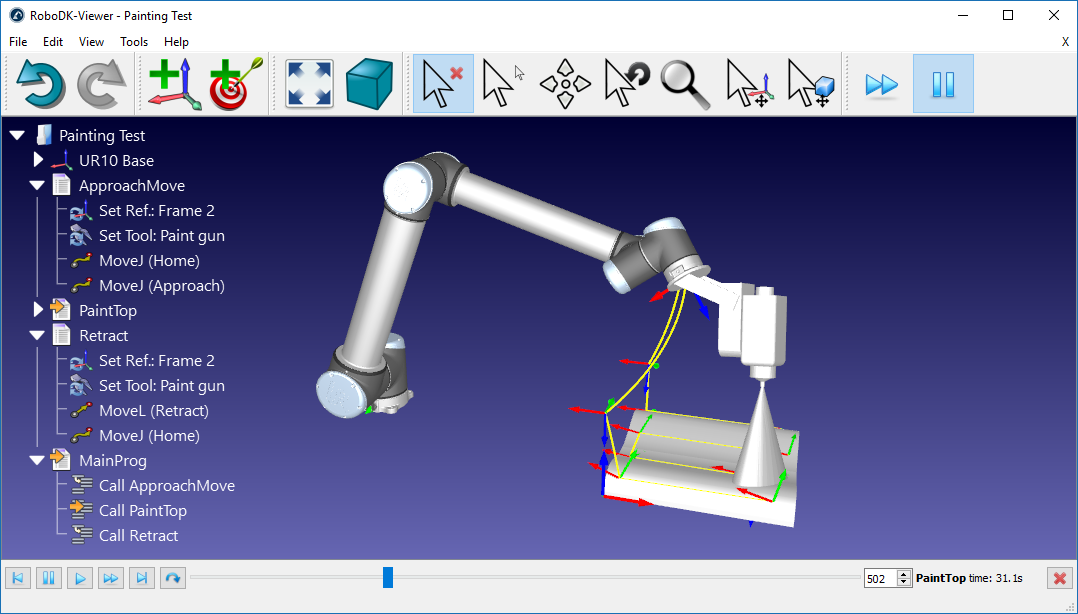
È possibile esportare simulazioni come file 3D HTML o 3D PDF oppure distribuire la tua stazione come versione semplificata di RoboDK (RoboDK Viewer)
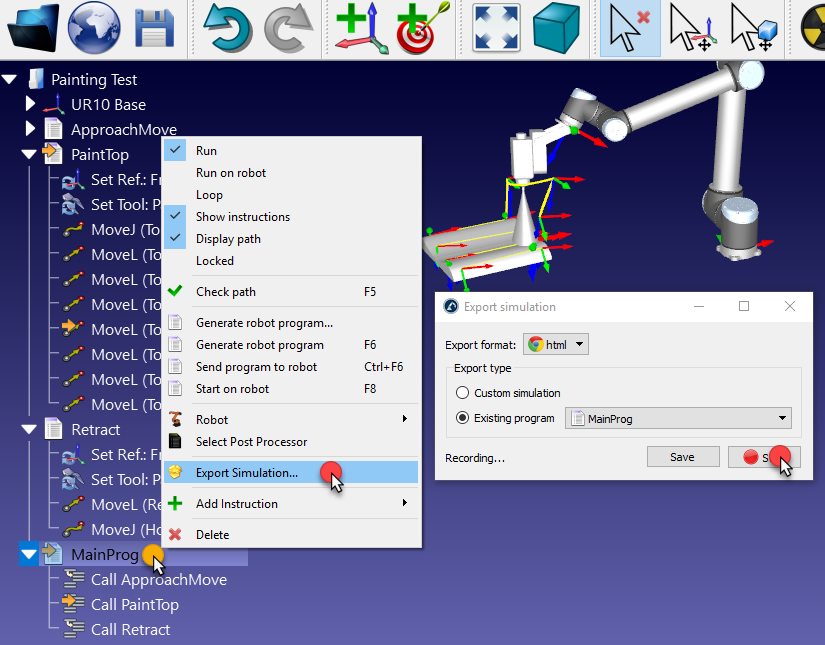
documenti 3D HTML e 3D PDF possono esser generati seguendo questi passi:
1.Clicca con il tasto destro sul programma Main
2.Seleziona![]() Esporta Simulazione...
Esporta Simulazione...
3.SelezionaStart.Il programma inizierà e la simulazione sarà registrata fino al completamento del programma.
4.Salva il file. Dopo ch il file viene salvato sarà automaticamente aperto per vederne un'anteprima.
Simulazioni HTML e PDF sono salvate come file singolo. Comprimere un file HTML ne riducerà drasticamente le sue dimensioni. Le simulazioni PDF devono esser aperte con Acrobat Reader. Esportare formati PDF è disponibile solamente per piattaforme Windows.
I seguenti link sono esempi di Simulazioni 3D HTML:
o//m.sinclairbody.com/simulations/UR-Paint.html
o//m.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.html
o//m.sinclairbody.com/simulations/Robot-Drawing.html
I seguenti link sono esempi di Simulazioni 3D PDF:
o//m.sinclairbody.com/simulations/UR-Paint.pdf
o//m.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.pdf
o//m.sinclairbody.com/simulations/Milling-with-External-Axes.pdf
Un altro modo per esportare simulazioni 3D è generare file EXE auto-estraibili o un file ZIP con una versione ridotta di RoboDK (disponibile solamente per versioni Windows), come mostrato nella seguente immagine.
Per generare questo file:
1.SelezionaFile![]() Crea una stazione demo
Crea una stazione demo
2.Seleziona l'output preferito (formati ZIP o EXE)
3.SelectGenerate file
Dopo alcuni secondi, sarà generato il file desiderato (20 MB) che sarà una versione semplificata di RoboDK. La stazione sarà automaticamente caricata all'avvio.
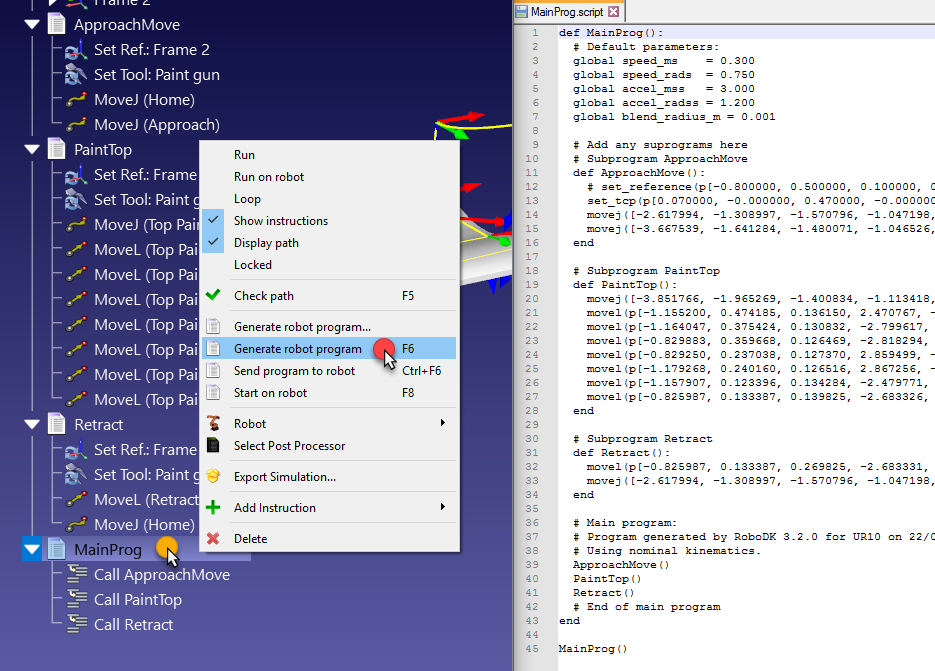
È possibile esportare ogni programma individualmente o il programma main includendo i sub-programmi:
1.Clicca con il tasto destro il programma (MainProgper esempio)
2.SelezionaGenera programma robot (F6)
In alternativa, selezionaGenera programma robot...per specificare la posizione del file da salvare
3.Il programma SCRIPT per robot UR sarà visualizzato nell'editor testi
Il file è il risultato della generazione del programma offline. Il file può essere mandato al controller del robot per eseguire gli stessi movimenti simulati in RoboDK.
oSelezionaManda programma al robot (Ctrl+F6)per mandare il programma tramite FTP (Programmazione Offline)
oSelezionaInizia su robot (F8)per mandare il programma al robot per eseguirlo (Programmazione Offline)
oControlla l'opzioneEsegui su robotper iniziare il programma passo passo ogni volta che iniziamo il programma (Programmazione Offline). Ciò permette di eseguire il programma sul robot allo stesso momento della simulazione. Driver robot sono obbligatori per la Programmazione Online
È possibile cambiare il post processore per robot UR e personalizzare il modo in cui un programma è generato:
1.Clicca con il tasto destro un programma o un robot
2.Seleziona![]() Seleziona Post Processore
Seleziona Post Processore
3.SelezionaUniversal Robots
Generare nuovamente il programma. In questo esempio, il post processore di default utilizza valori giunti per definire ogni movimento lineare e il secondo post processore utilizza coordinate cartesiane per definire ogni movimento lineare.
L让被di RoboDK能di personalizzare形式lazione come si desidera. Di default, RoboDK installa Python e un set di macro che permettono un livello alto di personalizzazione. Ciò include di simulare una pistola per verniciare, programmare robot tramite Python, simulare camere 2D, convertire file SVG in programmi robot, impostare automaticamente il TCP, simulare eventi e molto di più. Altri linguaggi di programmazione sono disponibili, come C# o Matlab. Per più informazioni visitare://m.sinclairbody.com/doc/PythonAPI/intro.html
在questo esempio, aggiungeremo una单纯的宏che simulerà il comportamento della pistola per verniciare. Ricoloreremo anche il volume dello spray con un colore trasparente (selezionandoStrumenti➔Cambia colore tool - Shift+T) o carica il modello esistente con colori appropriati (disponibile dalla libreria locale comepaint_gun.tooloppure la libreria online, nota che potrebbe esser necessario aggiornare l'istruzione Imposta Tool)
1.SelezionaFile➔![]() Apri
Apri
2.Navigare in C:/RoboDK/Library/Macros/ per vedere alcune macro di esempio
3.SelezionaSprayOn
4.SelezionaApri.Un nuovo oggetto Python![]() sarà aggiunto. Questa macro permette di simulare la deposizione di particelle modellando il volume spray
sarà aggiunto. Questa macro permette di simulare la deposizione di particelle modellando il volume spray
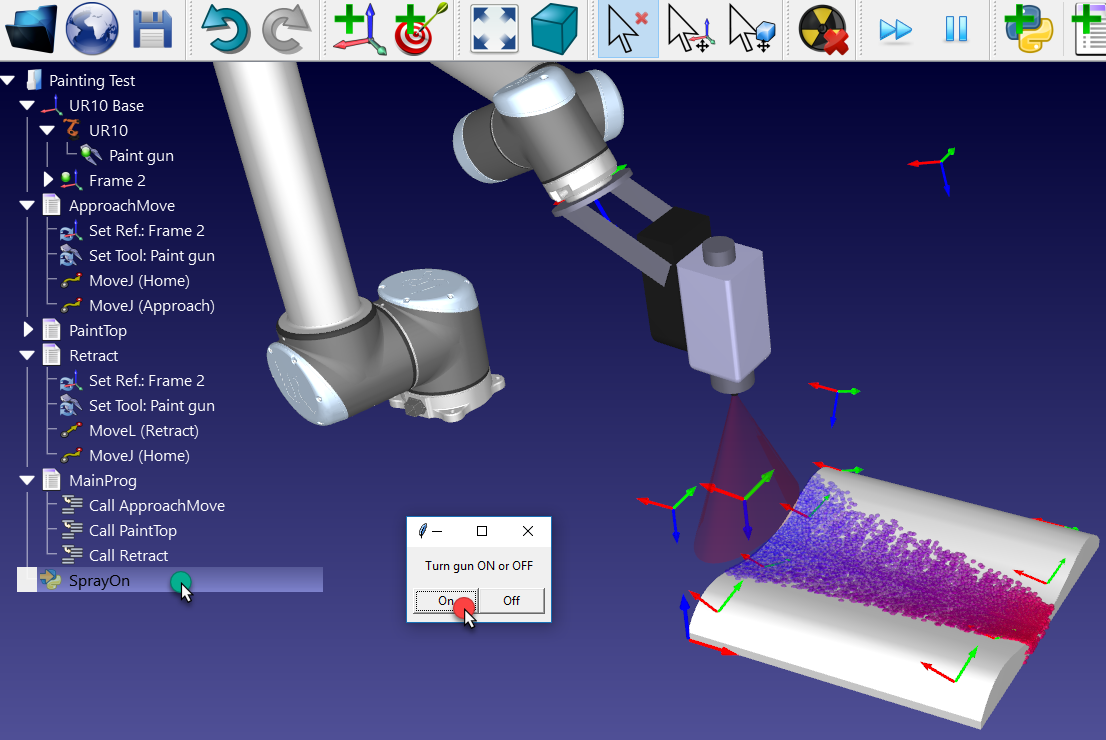
5.Fare doppio click suSprayOnper testarla
6.SelezionaOnper attivarla
7.Tieni premuto il tasto Alt, trascina la flangia del robot e spostare il robot sulla superficie assieme alla pistola.
Si dovrebbe visualizzare la traccia della pistola. Il colore e la trasparenza dovrebbero cambiare in relazione di quanto è vicino il TCP alla superficie.
Seleziona Esc una volta per cancellare la simulazione della verniciatura.
8.Fai doppio click sullo stesso programmaSprayOne selezionaOffper interrompere la simulazione.
Per comprendere meglio cosa succede dietro le quinte, è possibile vedere o modificare il codice Python in questa maniera:
1.Clicca con il tasto destro su![]() SprayOn
SprayOn
2.SelezionaModifica Python Script
Una nuova finestra (editor di testo) apparirà visualizzando il codice che modella il comportamento dello spray e come Python è integrato con RoboDK.
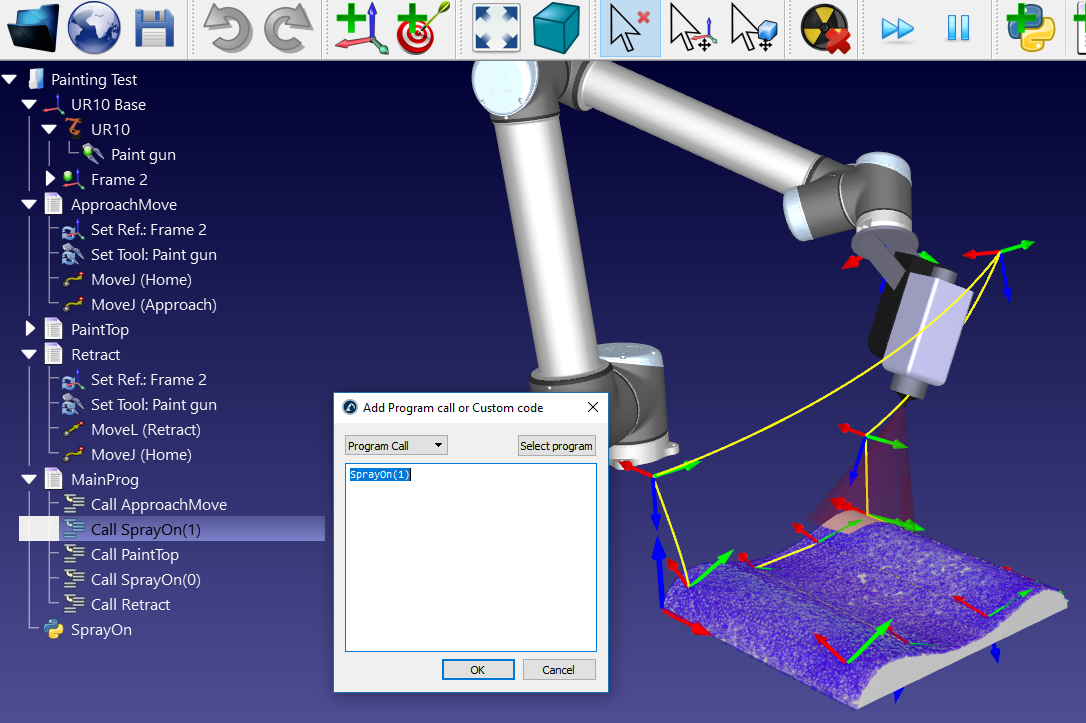
Per considerare la simulazione dello spray nello programma main segure questi passi:
1.Seleziona l'istruzioneCall ApproachMove
2.SelezionaProgramma➔![]() Chiamata Programmauna nuova istruzione sarà aggiunta dopo la prima chiamata programma e una nuova finestra comparirà
Chiamata Programmauna nuova istruzione sarà aggiunta dopo la prima chiamata programma e una nuova finestra comparirà
3.InserisciSprayOn(1)
4.Seleziona OK
5.Ripeti la stessa operazione dopo il programmaPaintTopimpostandoSprayOn(o)come mostrato nella seguente immagine.
Se necessario, riordinare le istruzioni trascinandole all'interno del programma
6.Inizia il programmaMainProg.Dopo due iterazioni, il risultato dovrebbe assomigliare a quello mostrato nella immagine (simulando a velocità normale)
È anche possibile aggiungere nuove macro:
1.SelezionaProgramma➔![]() Aggiungi un Programma Python
Aggiungi un Programma Python
2.Clicca con il tasto destro sul nuovo programma e selezionaModifica Script Python
Prossimo:RoboDK supporta di impostare la velocità all'interno del programma, impostare output digitali, aspettare output digitali, visualizzare messaggi, etc. Queste istruzioni sono disponibili nel menuProgramma.