Per iniziare
Segui questi passi per creare un programma per spostarsi dal bersaglioHomeal bersaglioApprocio:
1.SelezionaProgramma➔![]() Aggiungi Programmadal menù o dal pulsante corrispondente nella toolbar (come mostrato nella prossima immagine)
Aggiungi Programmadal menù o dal pulsante corrispondente nella toolbar (come mostrato nella prossima immagine)
2.Rinomina il programma inApproachMove
3.Seleziona il bersaglioHome
4.SelezionaProgramma➔![]() Sposta Giunti(o il pulsante corrispondente nella toolbar)
Sposta Giunti(o il pulsante corrispondente nella toolbar)
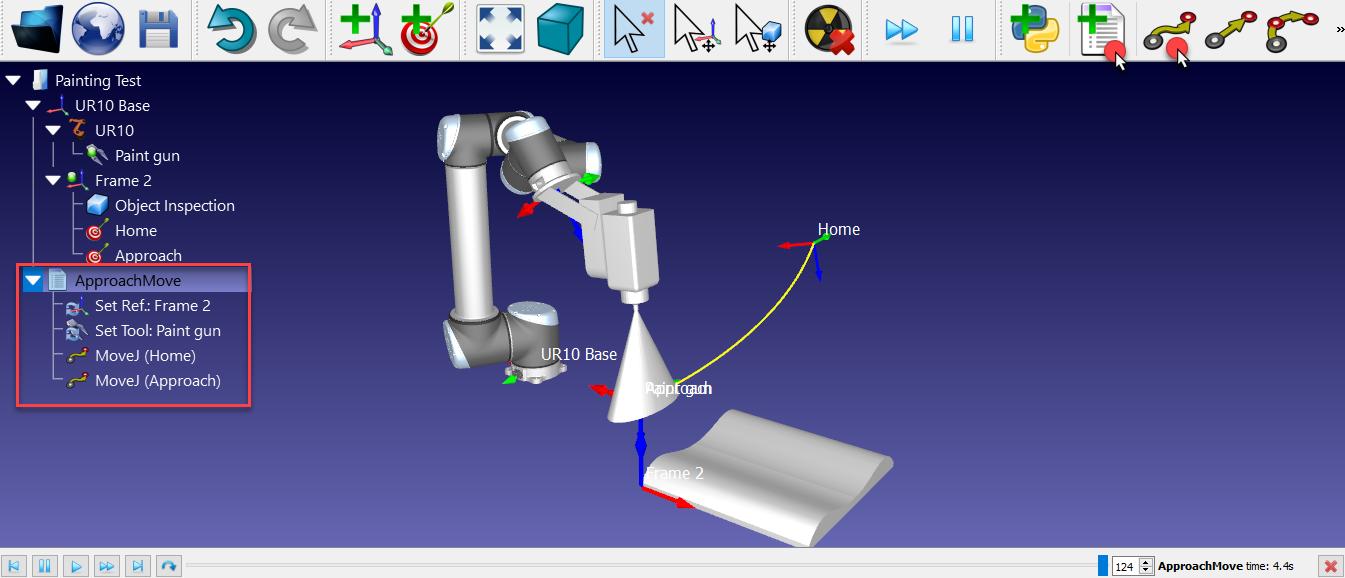
Due istruzioni saranno aggiunte automaticamente per indicare al robot che tool e piano di riferimento stiamo utilizzando
5.Seleziona il bersaglioApprocio
6.SelezionaProgramma➔![]() Sposta giuntiancora una volta
Sposta giuntiancora una volta
Fai doppio click sul programmaApproachMovee我们eseguita simulazione del programma。拉barra della simulazione ed una stima del tempo ciclo compariranno.