Menu Opzioni
SelezionaStrumenti➔![]() Opzioni (Shift+O)per aprire la finestra principale delle impostazioni di RoboDK.
Opzioni (Shift+O)per aprire la finestra principale delle impostazioni di RoboDK.
La maggior parte delle impostazioi sono salvate nell'account utente del computer. Cambiare l'account utente non manterrà le modifiche effettuate a queste opzioni. Come eccezione, le impostazioni delle Stazione e i parametri della stazione (disponibili nella scheda Generali) sono salvati con ciascuna Stazione (file RDK)
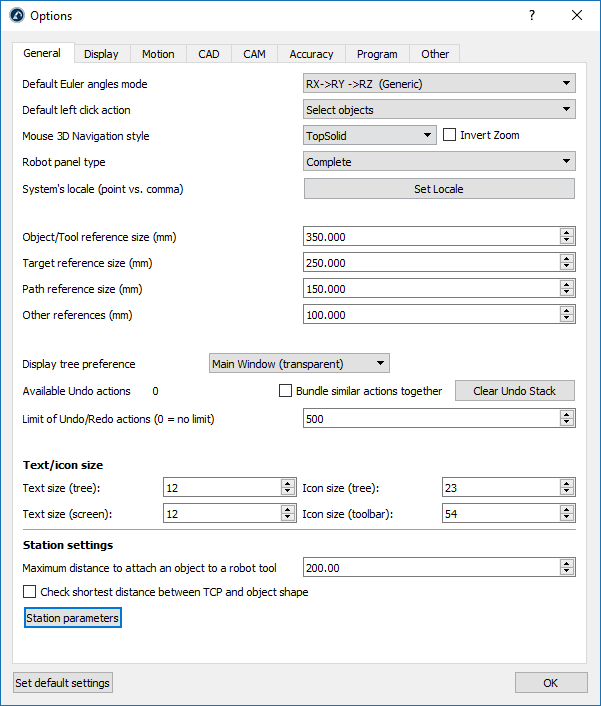
Lamodalità di default degli angoli di Euleropermette di selezionare l'ordine in quale le rotazioni dei piani sono eseguite di default. Un piano di riferimento generico contiene informazioni di posizione e orientamento. I piani di riferimento sono pose e possono essere rappresentate utilizzando posizioni XYZ e rotazioni attorno agli assi X,Y e Z. L'ordine delle rotazioni è molto importante. RoboDK pre-seleziona il formato/ordine corretto dipendentemente dal robot utilizzato. Più informazioni nella sezionepiani di riferimento.
L'azione di default del click sinistroè impostato di default per selezionare gli oggetti. È possibile modificarlo in altre impostazioni di navigazione 3D, ad esempio rotazione.
Con lostile di Navigazione Mouse 3Dè possibile specificare il tipo preferito di navigazione 3D con il mouse per emulare un software specifico, come Rhinoceros, Catia, TopSolid o Vero.
Il tipo dipannello机器人è impostato suCompletodi违约。首席信息官mostrerà un pannello robot completo. Imposta questa opzione su Normale o Basico per ridurre il numero di opzioni disponibili nel pannello robot.
La locale di sistema permette di impostare la locale per specificare lingua e paese. Ciò mostrerà i numeri nel formato corretto e utilizzerà il corretto carattere per il punto decimale.
Dimensione riferimento Piano/Bersaglio/Percorso/Altrodefinisce la dimensione del piano sullo schermo per un elemento specifico. È anche raccomandato utilizzare i tasti + e - per ingrandire o rimpicciolire le dimensioni proporzionalmente.
Le preferenze di visualizzazione dell'alberomostreranno l'albero della stazione all'interno della finestra principale di default. Modificala inFinestra Lateraleper mostrare l'albero in una finestra separata.
È anche possibileCancellare la Pila Annullaper cancellare la memoria RAM. È anche possibile limitare le azioni di Annulla/Ripeti salvate in memoria. Se RoboDK è lento potrebbe essere perchè c'è una pila lunga di annulla rimasta salvata. Di default, azioni simili non sono raggruppate assieme. per esempio, se un piano di riferimento viene spostato, ogni piccolo step sarà registrato. ControllaRaggruppa assieme azioni similiper evitare questo comportamento.
La sezionedimensione Testo/Iconapermette di modificare la dimensione del testo e delle icone nell'albero e nella toolbar.
LaDistanza massima di collegamento di un oggetto al tool del robotè utilizzata come unasimulazione di un evento. Eventi simulati possono collegare oggetti al tool e simulare eventi specifici. Questi eventi non hanno impatto sul codice generato, sono solo utilizzati per scopi di simulazione.
IParametri della stazione园子温parametri salvati nel文件RDK e possono存在re modificati manualmente tramite l'API. I parametri della stazione permettono di simulareInput Digitali e Output Difitalie comunicare la simulazione con altri sistemi tramite l'API come un PLC.
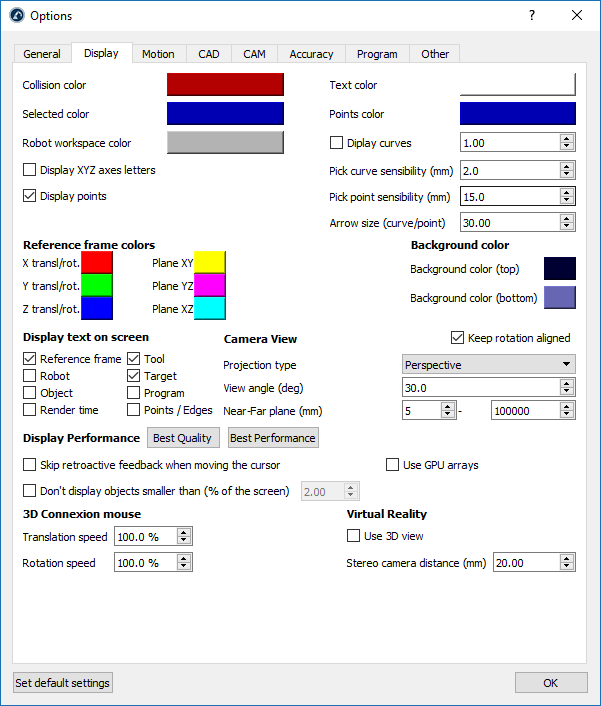
Seleziona il pulsante colorato vicino al colore Collisione, colore Selezionato, colore Testo o colore Punto per cambiare i colori di default utilizzati nello schermo principale.
SelezionaVisualizza lettere assi XYZper visualizzare i piani di riferimento con le lettere X,Y,Z corrispondenti. Di default, non sono visualizzate e i colori standard Rosso (X), Verde (Y) e Blue (Z) sono utilizzati.
Incrementa laSensibilità curva/puntoper rendere più facile selezionare curve e punti rispettivamente. In alternativa se le curve o i punti sono troppo vicini gli uni agli altri e non è semplice selezionarli, è meglio ridurre questi valori.
LaDimensione Freccia (curva/punto)è la dimensione della freccia verde visualizzata nei progetti segui punti o curva (disponibile nel menuUtilità).
I colori del piano di riferimento possono essere aggiornati come anche il colore di sfondo (i colori del piano sono visualizzati mentre vengono spostati con il mouse).
LaVista Fotocameraè impostata suProspettivadi违约。È possibile modificarla suOrtogonalee aggiornare alcune impostazioni come l'angolo di visuale e i piani Vicino/Lontano.
DeselezionaMantieni rotazione allineataper rotare in ogni direzione.
Di default le impostazioni sono impostate per ottenere unaQualità Migliore.Impostare lePerformance VisualizzazionesuPerformance Migliorise RoboDK è lento perchè ci sono troppi oggetti visualizzati. Ciò forzerà l'uso della GPU senza visualizzare gli oggetti piccoli sullo schermo.
È possibile utilizzare unMouse 3D Connexion,ad esempio SpaceNavigator e modificare la velocità di traslazione e rotazione per l'utilizzo con quel mouse.
È anche possibile visualizzare RoboDK su uno schermo 3D (utilizzare la vista 3D per la Realtà Virtuale). La distanza della Stereo camera definirà quanto vicino o lontano sembreranno gli oggetti.
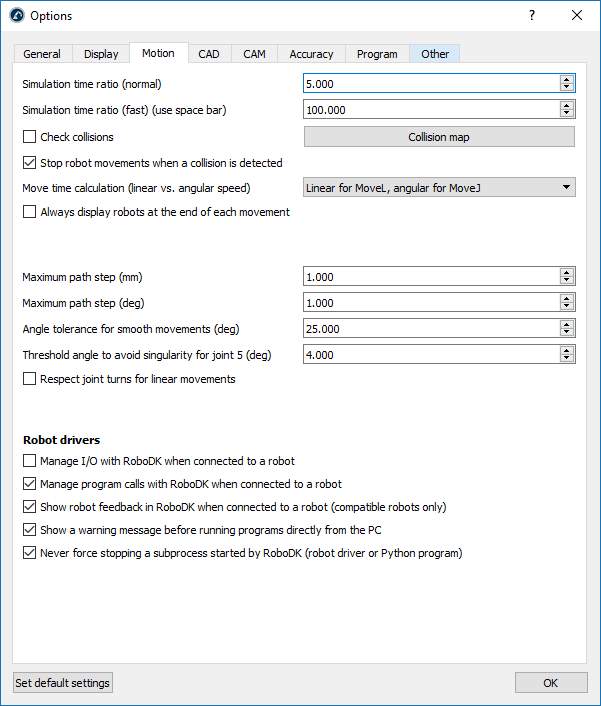
La ratio di simulazione definisce quanto veloce avviene la simulazione rispetto al tempo reale. La ratio di simulazione di 5 di default significa che 1 secondo del simulatore equivale a 5 secondi nel tempo reale sul robot. Più informazioni disponibili nella sezioneRatio Simulazione.
![]() Controlla collisionie la
Controlla collisionie la![]() Mappa collisionipermette di attivare/disattivare il controllo collisione. Queste impostazioni possono anche essere modificate dalla toolbar nelmenu Strumenti. Di default, tutti i programmi e movimenti robot saranno interrotti se una collisione è rilevata, deselezionaInterrompi movimenti robot quando una collisione è rilevataper evitare questo comportamento. Più informazioni riguardo alle impostazioni della mappa collisioni nella sezioneSuggerimenti Collisione
Mappa collisionipermette di attivare/disattivare il controllo collisione. Queste impostazioni possono anche essere modificate dalla toolbar nelmenu Strumenti. Di default, tutti i programmi e movimenti robot saranno interrotti se una collisione è rilevata, deselezionaInterrompi movimenti robot quando una collisione è rilevataper evitare questo comportamento. Più informazioni riguardo alle impostazioni della mappa collisioni nella sezioneSuggerimenti Collisione
I calcolo del tempo di movimento definisce come RoboDK calcola il tempo ciclo e come il robot utilizza le istruzioni lineari/angolari velocità/accelerazione per simulazione e tempo. Più informazioni disponibili nella sezioneTempo Ciclo.
Se la ratio di simulazione è troppo veloce il computer potrebbe non esser in grado di visualizzare il robot alla fine di ogni tracciato per mantenere una simulazione veloce. Per evitare questo effetto: selezionaMostra sempre robot alla fine di ogni movimento.
Il passo massimo (mm/grado) definisce come RoboDK discretizza ogni movimento lineare e giunti per finalità di simulazione.
IlLimite angolo per evitare singolarità sul giunto 5 (gradi)e utilizzato每机器人6 assi evitare le罪golarità del polso. Se una singolarità viene rilevata, il programma robot deve essere modificato in modo da essere sicuri sia eseguito correttamente nel controller reale.
La sezioneDriver Robotpermette di specificare il comportamento dei driver robot. I driver robot permettono di avere un collegamento diretto tra il robot reale e RoboDK.
Gestisci I/O con RoboDK quando connesso ad un robot reale simulerà Input e Output come parametri RoboDK invece che alterare lo stato di Input/Output sul robot.
L'opzioneMostra feedback robot in RoboDK quando connesso ad un robotmostrerà i movimenti robot in tempo reale come il robot si muove.
Mostra un messaggio di avviso prima di iniziare un programma direttamente dal PC mostrerà una finestra popup prima che un programma sia eseguito dal PC (quando è utilizzata l'opzione Inizia su Robot).
DeselezioneNon forzare lo stop di un subprocesso iniziato da RoboDKse riscontri problemi con i driver robot. Ciò assicurerà che nessun altro processo sia in esecuzione dietro le quinte quando una nuova connessione è impostata.
La sezione CAD (Computer-aided design) permette di specificare tutte le impostazioni connesse all'importazione di file parametrici (STEP/STP e IGES/IGS) e visualizzare questi file nell'ambiente 3D
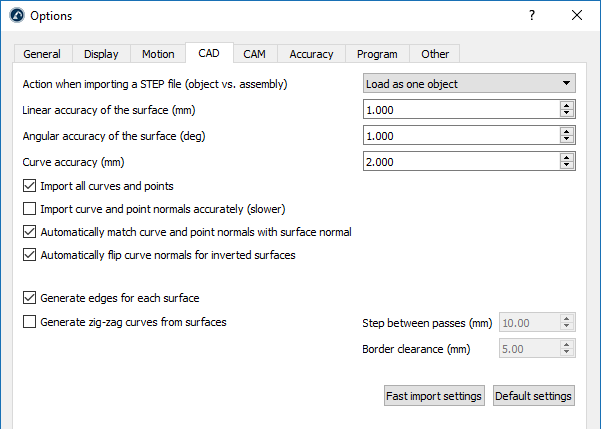
Aumentare l'accuratezza Lineare/Angolare della superficie per importare i file più velocemente. Decrementare questi valori per migliorare l'accuratezza degli oggetti importati.
Se stiamo usando un progetto segui curva o punto (dal menuUtilità) e stiamo utilizzando un'impostazione di importazione veloce non sarà possibile selezionare curve incluse in questi tipi di file parametrici. In questo caso, seleziona l'opzioneImporta tutte le curve e punti.
L'accuratezza della curva definisce quanto accurate le curve sono importate dai file parametrici. Di default RoboDK importerà le curve incluse in questi file. In più, RoboDK estrarrà gli spigoli delle curve nel file 3D.
È possibile generare automaticamente una curva a zig-zag da ogni superficie e specificare un passo tra le passate e quanto distante la curva è tenuta dal bordo. Ciò potrebbe essere utile per applicazioni di verniciatura o ispezione.
Più informazioni su queste impostazioni disponibili nella sezioneImporta STEP/IGES
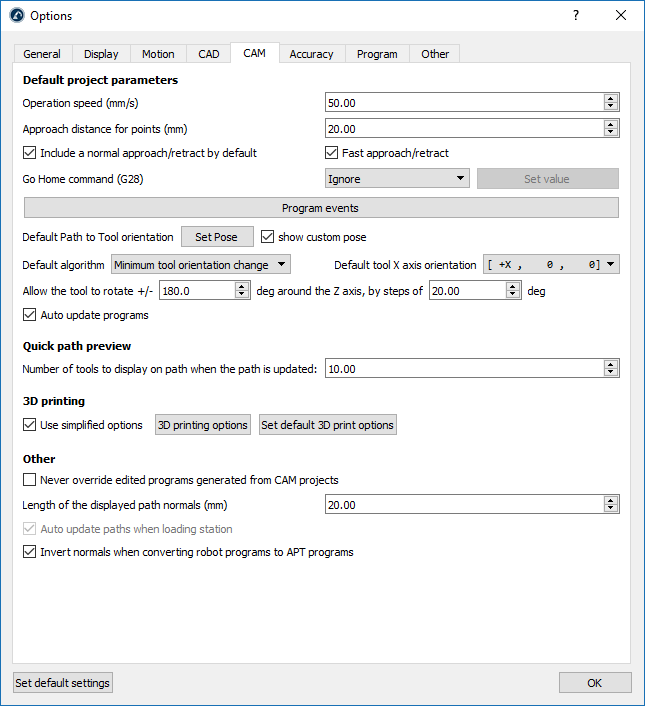
La sezione CAM (computer-aided manufacturing) contiene tutte le opzioni collegate alle operazioni di manifattura tipicamente eseguite da una macchina a controllo numerico (CNC) e come importare un percorso createo utilizzando un software CAM.
LaVelocità di Operazioneè la velocità di default utilizzata nelle operazioni di progetti di inseguimento curve e punti, disponibile nel menuUtilità
LaDistanza di approcio per puntiè la distanza di default utilizzata per approciare punti in un progetto di inseguimento punti. Questa opzione è utile per trapanatura o saldatura spot.
Includi un approcio/ritrazione normale di defalutincluderà un approcio di 100 mm normale al percorso.
È possibile ignorare il comandoVai in Home(G28 ISO code) impostato da uno specifico programma di fresatura, oppure specificare un valore di coordinate X,Y,Z.
IlProgramma Eventidefinisce quali azioni sono eseguite per specifici eventi G-code, ad esempio impostare digiral output, gestire teste di estrusione o azionare programmi specifici a diversi stadi delle operazioni di manifattura.
Altre opzioni sono disponibili per definire impostazioni di default quando un progetto di fresatura viene iniziato. Queste opzioni sono le stesse disponibili nel menufresatura robot.
La sezioneAnteprima veloce percorsopermette di impostare quanti tools sono visualizzati come preview quando un piano di riferimento viene spostato.
È possibile aprire leopzioni di stampa 3Ddello Slicer dalla sezione stampa 3D. Uno Slicer divide un oggetto in percorso macchina, poi, il percorso può essere facilmente convertito in programma robot con RoboDK.
Programmi robot generati da programmi CAM possono essere modificati dopo che son stati generati. Tuttavia, aggiornare le impostazioni dal menu fresatura robot sovrascriverà ogni programma precedentemente generato. SelezionaNon sovrascrivere programmi generati con progetti CAMper evitare di perdere eventuali cambiamenti.
LaLunghezza normali visualizzate (mm)è la lunghezza del vettore bianco che rappresenta la normale di un percorso CAM. Il percorso CAM è visualizzato in verde.
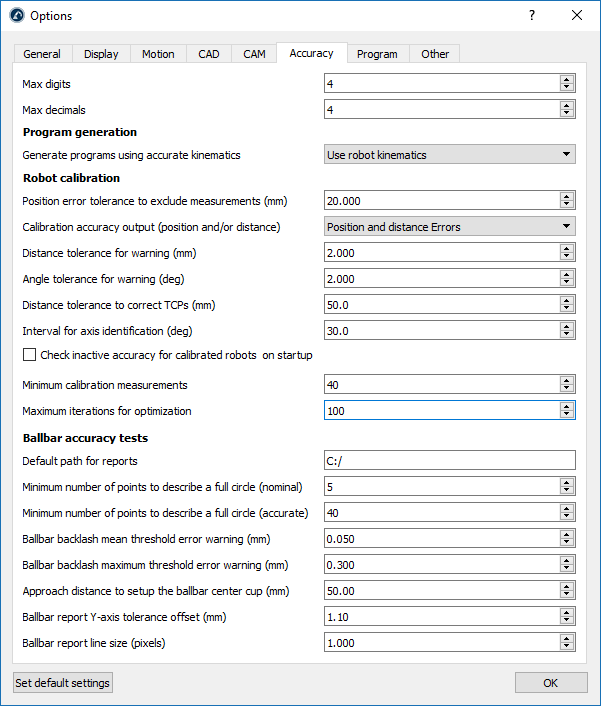
LeCifre massimee iDecimali massimirappresentano quante cifre/decimali sono visualizzati prima del punto decimale e dopo il punto decimale rispettivamente, per bersagli giunti nell'interfaccia grafica.
La scheda Accuratezza visualizza opzioni specifiche connesse allaCalibrazione RoboteTest Ballbar
La scheda Programma visualizza impostazioni relative aiprogrammi.
SelezionareAggiorna percorso programma quando la stazione viene caricataaggiornerà qualunque problema nei programmi e visualizzerà i programmi che hanno problemi con un simbolo:![]() . Ha lo stesso effetto di cliccare con il tasto destro sul programma e selezionare Valida Percorso. Deseleziona questa opzione per caricare programmi più velocemente. Questa opzione salta programmi lunghi (più di 1000 istruzioni)
. Ha lo stesso effetto di cliccare con il tasto destro sul programma e selezionare Valida Percorso. Deseleziona questa opzione per caricare programmi più velocemente. Questa opzione salta programmi lunghi (più di 1000 istruzioni)
SelezionareNascondi percorso programma di defaultnon visualizzerà il percorso del programma quando nuovi programmi sono generati. Clicca con il tasto destro sul programma e seleziona/deselezionaVisualizza percorsorispettivamente per visualizzare/nascondere il percorso giallo del robot TCP.
Utilizza numeri Tool/Piani per Tool/Piani numeratiutilizzerà il corrispondente numero di tool/piano invece che aggiornare il tool/piano nel controller robot. Ciò è disponibile per controller robot che utilizzano numeri invece che variabili. Questo comportamento può essere modificato tramite la personalizzazione del post processor.
È possibile forzare un specifico bersaglio in modo cheritorni movimenti giunti/linearinella generazione del programma, imponendo dati giunti o cartesiani. Di default, RoboDK utilizzerà le impostazioni del bersaglio (coordinate giunti per bersagli giunti e coordinate cartesiane per bersagli cartesiani)
Di default, RoboDK creerà nuovi bersagli come bersagli cartesiani, ciò significa che se un piano di riferimento viene spostato, la posizione del robot per raggiungere il bersaglio sarà diversa. È possibile selezionare bersagli giunti per imporre bersagli assoluti che non cambiano se il piano/tool cambia.
SelezionaSalta chiamate programma che non esistono nella stazioneper ignorare programmi generati.
Quando un piano di riferimento è utilizzato in un programma (utilizzandoImposta Piano di Riferimento) e quel riferimento viene poi spostato, il movimento del robot è alterato. Di default, l'istruzione imposta piano di riferimento posizionerà il piano di riferimento del robot nella sua posizione originale senza alterare il riferimento della stazione,
Limita il massimo numero di linee per programmapuò essere selezionato per specificare quante linee un programma può avere al massimo. Ciò dividerà programmi lunghi in sub-programmi e genererà un programma main che farà partire questi programmi minori in sequenza. I controller robot hanno una capacità limitata e possono eseguire programmi di una certa dimensione. Fatta eccezione per specifici/vecchi controllori, la maggiorparte può gestire 5000 linee per programma.
Infine, impostazioni specifche sono disponibili per specifici produttori di robot che utilizzano post-processori integrati. D'altra parte, post processori personalizzati permettono una personalizzazione o imporre certi comportamenti prima di essere generati.

La scheda altro visualizza impostazioni collegate all'API di RoboDK, l'API di Python e altre impostazioni specifiche.
SelezionaImposta Impostazioni di default di Pythonper vedere le impostazioni di Python visualizzate nella prossima immagine. Ciò suggerirà di aggiornare l'API di Python di RoboDK se non è stata aggiornata. L'API di Python per RoboDK sono due file salvati nella cartella di Python (robolink.pyerobodk.py)
Di default, RoboDK salverà la stazione RDK ogni volta che uno script viene salvato. DeselezionaSalva automaticamente la stazione quando uno script Python viene salvatoper non salvare il file RDK.
È raccomandato installare FileZilla Client per trasferire programmi robot dal computer direttamente al robot se sono entambi connessi alla stessa rete.
È anche raccomandato utilizzare Notepad++ in Windows per vedere o modificare programmi o Post Processori. Tuttavia RoboDK utilizzerà Scintilla e Python IDLE di default.
È possibile permettere comunicazioni esterne della API RoboDK selezionandoPermetti API esternee selezionando un'appropriata porta e server IP.
SelezionaImpostazioni Proxyper utilizzare un server proxy quando utilizzi una licenza in rete o sei connesso alla libreria online.
