Robots ABB
RoboDK supporta tutti i robot ABB programmati in linguaggio RAPID, inclusi PRG e MOD (controller IRC5, S4 e S4C). Questa documentazione è basata su controller ABB IRC5.
Le seguenti sezioni dimostrano operazioni tipiche che utlizzano un tech pendant ABB per preparare un nuovo programma in RoboDK e poi trasferirlo al robot.
Segui questi passi per caricare un programma module (MOD file) da una chiavetta USB:
1.SelezionaABB➔Program editor
2.SelezionaModules, in cima allo schermo
3.SelezionaFile➔Load module(non è importante il program pointer / PP)
4.Seleziona il file MOD dalla chiavetta USB
5.SelezionaOK
每iniziare Segui questi passi uno specifico掠夺ramma robot nel controller ABB:
1.形成层lo开关del controllo在密苏里州dalità manuale. Il messaggio "Manual" apparirà nel menù superiore
2.Seleziona:ABB➔Program editor➔Debug➔PP to routine
3.Seleziona il programma generato da RoboDK,main_RoboDKè il nome di default
4.Tieni premuto il tasto "uomo morto" dal teach pendant. Il messaggio "Motors On" come stato del robot dovrebbe essere visibile, come anche la luce arancione del robot dovrebbe esser accesa
5.Seleziona il pulsante play sul teach pendant per iniziare il programma

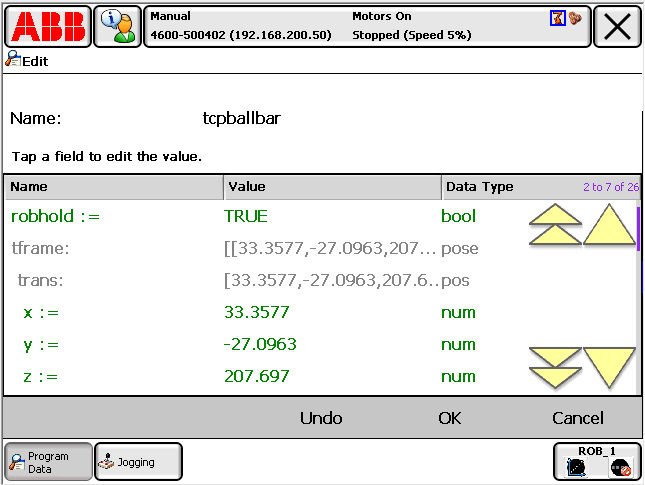
I prossimi passaggi permettono di creare o modificare i tools del robot (TCP, conosciuti anche cometooldatanella programmazione di robot ABB):
1.SelezionaABB➔Program data➔tooldata(doppio click)
2.È ora possibile creare o modificare le variabili esistenti del tool
3.Una volta che il tool è stato definito nei valori X,Y,Z, può esser ottenuto il TCP

I programmi possono essere facilmente trasferiti tramite FTP da RoboDK ai robots ABB:
1.Clicca con il tasto destru su robot in RoboDK
2.SelezionaConnetti a robot...
3.Inserisci l'IP del robot
4.Inserisci il percorso remoto FTP.
Il percorso completo può esser ottenuto dal teach pendant o utilizzando FileZilla FTP Client.
5.Inserisci le credenziali FTP (anonimo di default)
Una volta che il programma RoboDK è pronto per esser inviato al robot:
1.Clicca con il tasto destro su un programma in RoboDK
2.SelezionaInvia programma a robot (Ctrl+F6)
Ciò genererà il programma e proverà a trasferirlo al controllore del robot. Una finestra comparirà mostrando se il trasferimento FTP è stato completato o no


Quando i programmi sono trasferiti tramite FTP "al volo" devono essere caricati utilizzando un programma in RAPID dal lato robot. Il seguente esempio inizierà il programma main_RoboDK da un modulo chiamato MOD_Pick_and_place:
PERS bool progloaded := FALSE;
. . .
PROC Run_Program_FTP()
IF (progloaded=FALSE) THEN
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ELSE
UnLoad "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = FALSE;
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ENDIF
%main_RoboDK%; !call the main program from the module send and loaded
ENDPROC
I driver robot forniscono un'alternativa alla programmazione Offline (dove un programma è generato e poi trasferito al robot per la sua esecuzione). Con i driver robot, è possibile iniziare una simulazione direttamente sul robot (Programmazione Online). Più informazioni disponibili nella sezioneDriver Robot.
Una connessione fra RoboDK e il robot ABB può esser stabilita per muovere il robot in automatico da un PC connesso utilizzando RoboDK. Ciò permette di utilizzare l'opzione di RoboDKRun on robotper programmazione online e debug. La connessione può esser stabilita tramite una connessione Ethernet standard (TCP/IP).
Seguire questi passaggi per impostare i driver RoboDK per robot ABB:
1.Stabilire una connessione Ethernet fra il computer ed il robot
2.Trasferire il fileRoboDK_Driver.modeRoboDK_COM.modsul robot (tramite chiavetta USB, FileZilla, o RoboStudio). Dovrebbero esser utilizzati come task principale.
3.Seguire questi passaggi南科技吊坠ABB / caricare il programma dal tech pendant:
a.SelezionareABB➔Program Editor
b.SelezionareTaskePrograms(in cima)
c.SelezionaShow Modules(in fondo)
d.SelezionaFile➔Load Module…(seleziona YES per tralasciare il program pointer)
e.Seleziona il fileRoboDK_COM.mode seleziona OK
f.Seleziona il fileRoboDK_Driver.mode seleziona OK
4.Inizia il programmaMain(troverai il programma main in RoboDK_Driver.mod)
CONST string server_ip := "192.168.125.1";
La porta di comunicazione di default fornita per il programma è la 2000 ma può anche essere modificata.