Omron-TM机器人
使用默认的后处理程序,您将以ZIP文件的形式获得程序。您应该准备一个具有以下特征的USB驱动器,以便在机器人上正确加载文件:
1.将USB驱动器命名为TMROBOT(这一步很重要)。
2.在驱动器的根目录下创建一个名为TM_Export的新文件夹。
3.用您的项目在TM_Export中创建一个新文件夹(任何名称都可以)。
4.在前一个名为Projects的文件夹中创建一个新文件夹。
5.将ZIP程序放入Projects文件夹中。

按照以下步骤在TMFlow中加载程序:
1.按照上述步骤将从RoboDK创建的ZIP文件保存到USB驱动器的文件夹中。
2.选择主菜单➔系统➔导入/导出
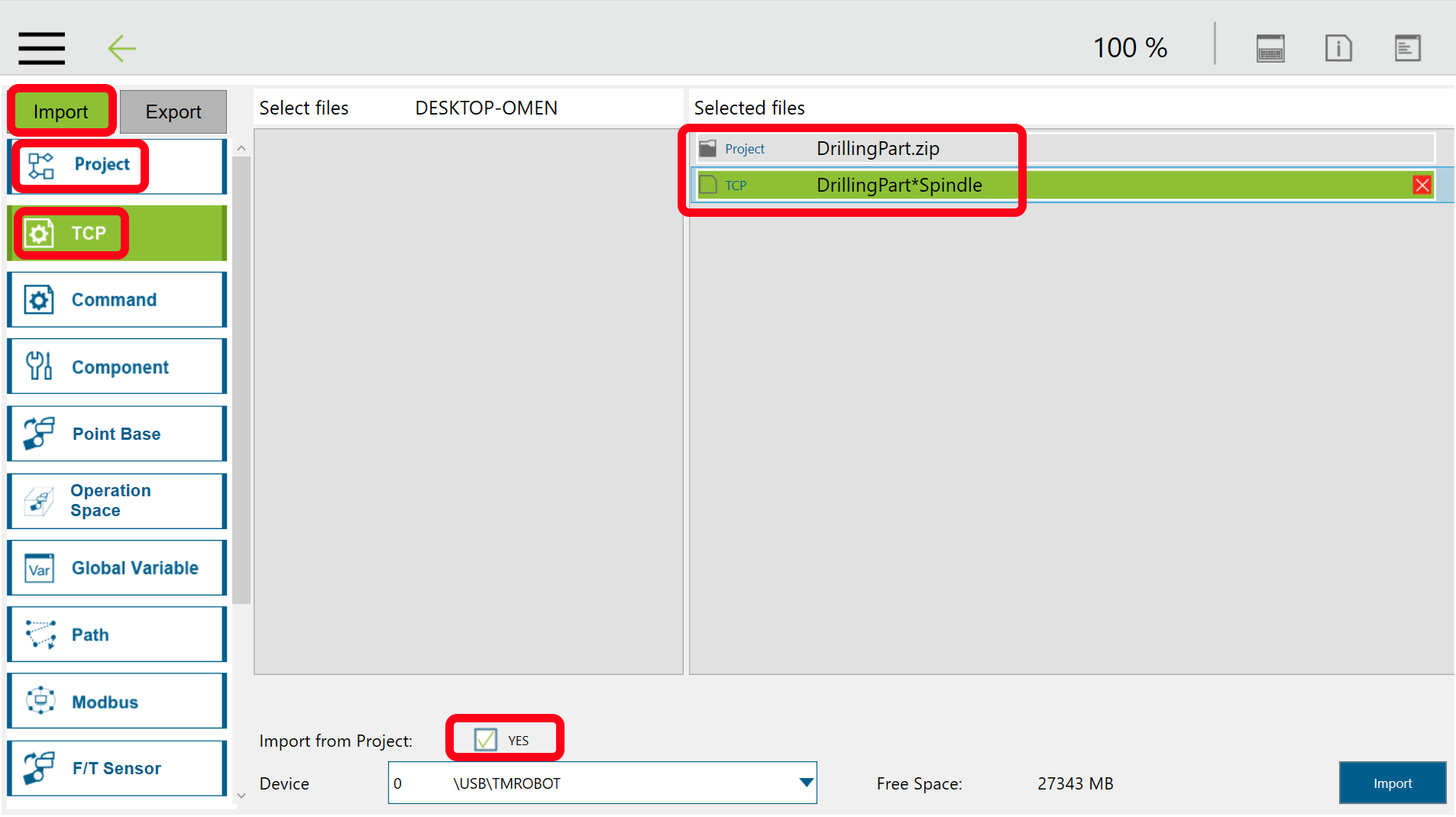
3.选择Import并选择TM_Export中的文件夹
4.选择Project并选择您的ZIP程序
5.选择TCP
6.选中从项目导入选项➔是的
7.选择您的程序,并选择程序中的工具,以确保加载它们。
8.选择Import
当您选择打开新程序时,您的程序现在将可用。