Omron-TM机器人
您可以使用RoboDK直接在您的欧姆龙tm机器人上运行程序司机Omron-TM。您还可以将程序生成为通过TCP/IP协议流式传输的脚本文件。在这两种情况下,您都应该确保机器人处于听节点。本节介绍如何在RoboDK和Omron-TM机器人上建立通信。
可以在不同的产品中进行选择后处理器或者自定义后置处理器来定义脱机生成和执行程序的方式(例如,支持夹持器或外部传感器)。
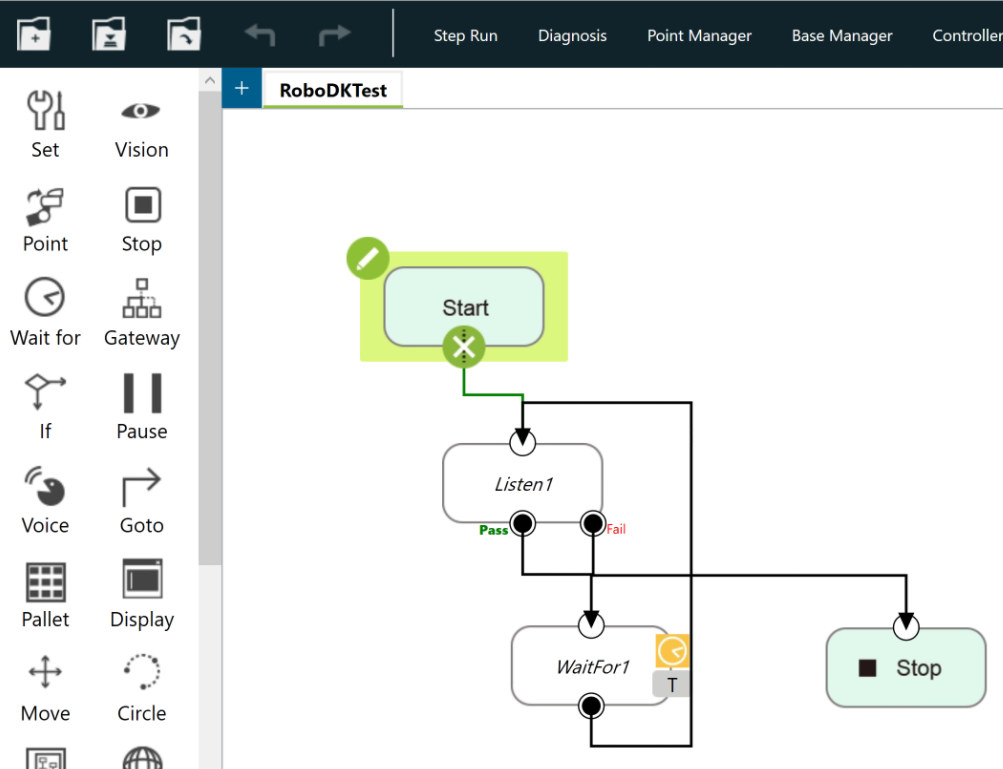
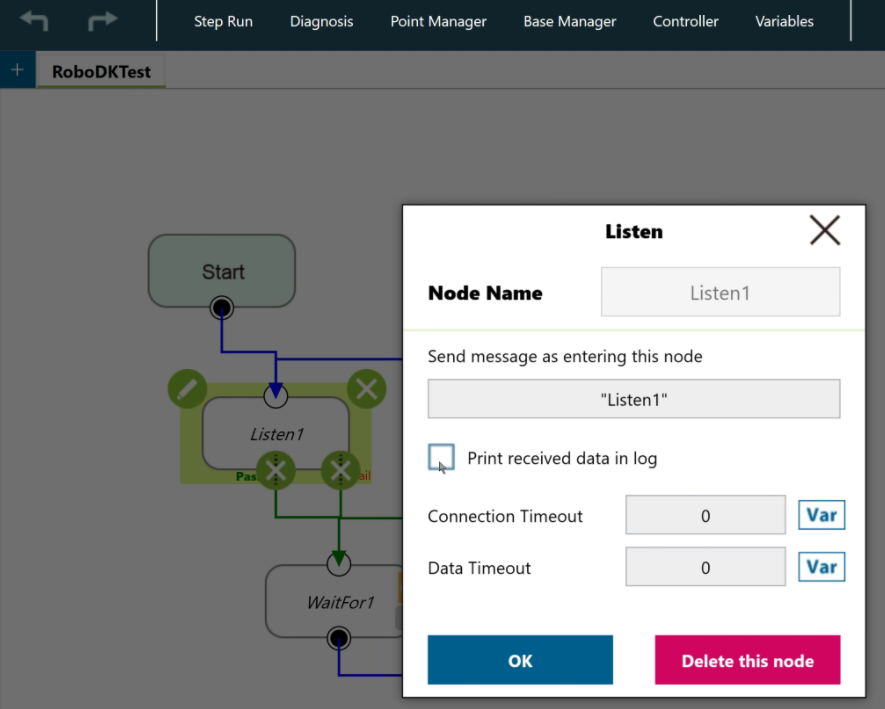
为了让机器人远程移动,机器人需要进入听模式。这是使用听节点。下图显示了一个建议的程序工作流,该程序可以自动执行从RoboDK发送的程序。建议选择在日志中打印接收到的数据解决问题。
按照以下步骤在RoboDK中设置通信并运行程序:
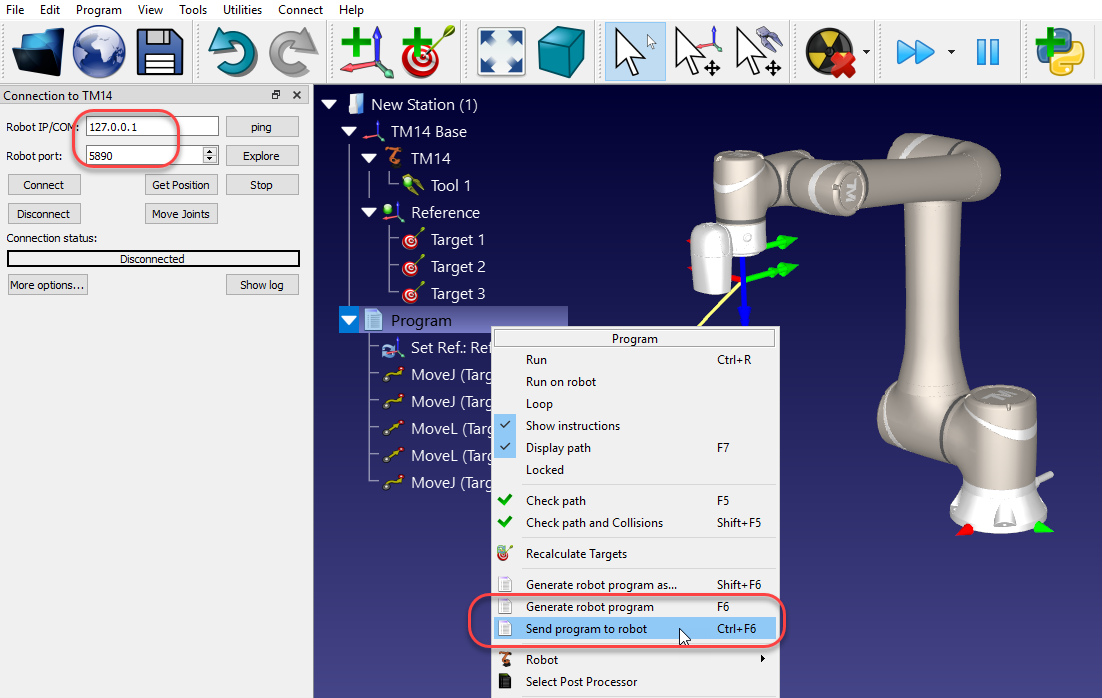
1.选择连接➔连接机器人
2.输入机器人IP
3.输入5890端口
4.右键单击您的程序
5.选择生成机器人程序F6。