本节提供对Meca500机器人进行编程时的其他有用信息。
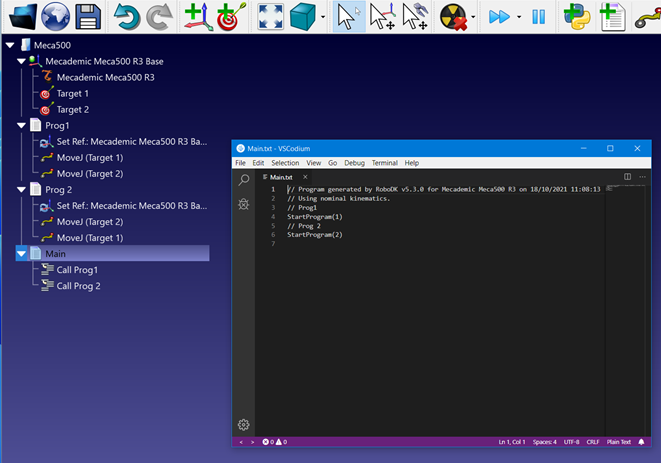
离线程序在机器人上是持久的,并且可以使用它们各自的程序号来调用。您可以通过将节目编号添加到节目名称中来自动选择节目编号。
RoboDK将自动检索ID并使用它来调用程序。这也适用于子例程,参见下面的示例。
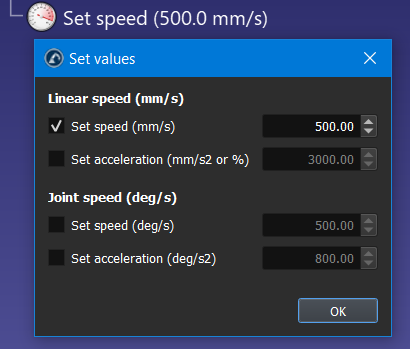
学术机器人的关节速度、线性和关节加速度单位应以百分比值(%)提供,而不是在设定速度指令菜单中显示的其他单位。
线速度正确,需要提供mm/s。