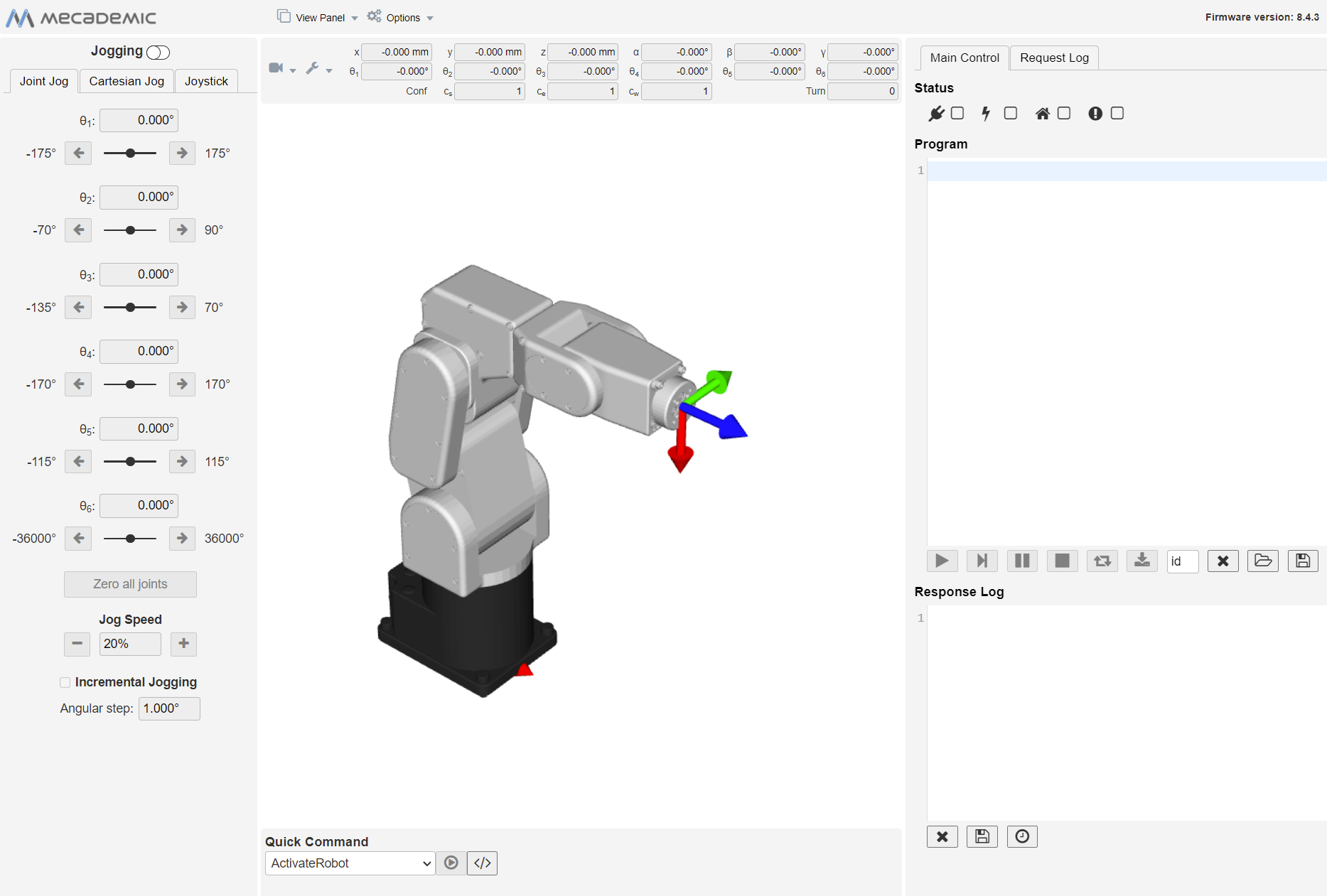
获得程序/脚本文件后,您可以运行程序或使用web界面将其加载到控制器上。按照以下步骤使用学术网络界面运行程序:
1.在浏览器上打开学术网络界面(输入机器人的IP地址)。
2.将脚本内容复制并粘贴到程序编辑器。
3.在状态酒吧,连接,激活和首页你的机器人。
4.点击玩按钮以运行程序。
5.点击保存按钮,将程序上传到机器人。