库卡机器人
机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间使用机器人驱动程序,可以直接在机器人上运行模拟(在线编程)。更多信息请参见机器人司机部分。
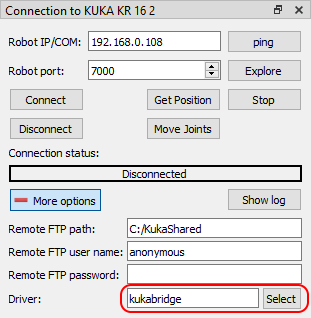
您可以在RoboDK和KUKA控制器之间建立连接,以便从您的计算机自动移动机器人。这允许使用RoboDK在机器人上运行在线编程和调试选项。可以通过标准的以太网连接(TCP/IP)建立连接。
如果您没有使用最新版本的RoboDK,您可能正在使用旧驱动程序(apikuka,基于KUKAVARPROXY项目)。要使用当前驱动程序,请确保kukabridge驱动程序被选中更多的选择部分连接机器人窗口。
按照以下步骤为KUKA设置RoboDK驱动程序:
1.得到了C3桥架安装工文件(c3setup可执行文件)驱动部分或者联系我们。
2.使用KUKA HMI,复制c3setup.exe安装程序文件到控制器的桌面或控制系统的文件夹。
3.连接鼠标(可选,但强烈推荐)。
可以将USB设备插入教学挂件或控制器(不需要重新启动)。
另外,也可以建立远程桌面连接。
这些步骤也可以通过教学挂件的触摸屏和虚拟键盘来完成。
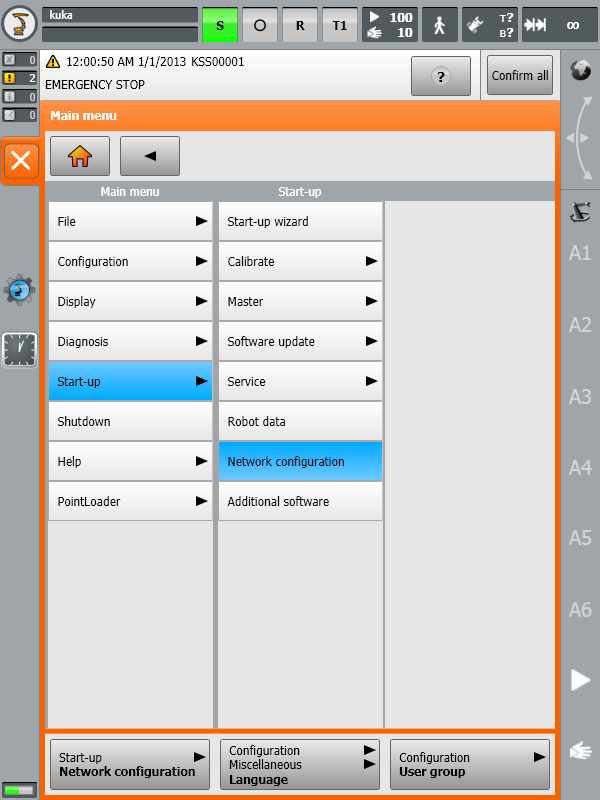
4.使用KUKA HMI应用程序,可以使用KUKA按钮打开主菜单![]() ,位于屏幕左上方:
,位于屏幕左上方:
一个。![]() 库卡➔配置➔用户组➔选择专家(密码:库卡)
库卡➔配置➔用户组➔选择专家(密码:库卡)
b。![]() 库卡➔启动➔服务➔减少人机界面(将出现Windows屏幕)
库卡➔启动➔服务➔减少人机界面(将出现Windows屏幕)
5.找到之前复制的文件c3setup-1.6.1.exe文件并运行它。按照安装程序的说明操作。
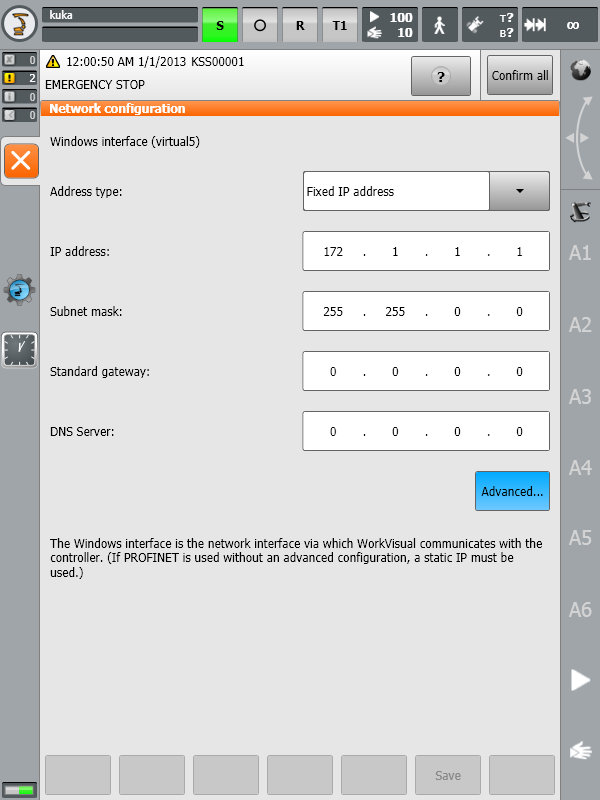
6.允许端口7000(或另一个端口,如果端口7000是忙,见下面的说明)用于TCP/UDP通信(KUKA KRC2控制器不需要此步骤):
一个。恢复HMI。
b。![]() 库卡➔启动➔网络配置➔先进的
库卡➔启动➔网络配置➔先进的
c。NAT➔添加一个端口➔端口号7000
d。设置允许的协议:tcp / udp
7.发射的C3桥接服务器从桌面快捷方式或开始菜单项(如果您选择了,可以跳过此步骤)运行C3 Bridge Server(最后一个安装步骤)。
8.要在系统启动时自动启动C3 Bridge Server,请将应用程序快捷方式从桌面复制到start的startup文件夹中米enu表示。
C3桥接服务器现在已经准备好了。您可以让这个程序继续运行。该服务器允许您在KUKA控制系统和远程PC之间交换全局变量值,下载和上传KRL程序,控制KRL程序的执行等等。2022世界杯国家队名单
控制系统的进一步配置可以通过两种方式完成:自动使用的交互模式kukabridge驱动程序(仅KRC4)和手动编辑KUKA HMI中的机器人控制系统文件。让我们来看看这两种方法。
这个脚本KUKA_Auto_Configuration.py在文件夹中C: \ RoboDK \图书馆\脚本可用于库卡控制系统的自动配置。在这种情况下,当前的RoboDK站必须包含至少一个库卡机器人,其IP地址和端口正确连接机器人窗口。该脚本可以从菜单中调用工具➔运行脚本或者通过Shift +年代热键。
先决条件:RoboDK版本5.5.2及以上,Windows操作系统,安装路径C: \ RoboDK。
1.使用以下命令打开命令shell开始➔所有程序➔配件➔命令提示符
或开始➔运行➔cmd。
2.将目录更改为C: \ RoboDK \ bin和启动kukabridge.exe通过执行以下命令:
c:
cd C: \ RoboDK \ bin
. . \ api \ \ kukabridge.exe机器人
3.现在库卡桥驱动程序以交互模式运行。
4.通过输入建立与控制系统的连接CONNECT <机器人IP地址> <端口> <机器人轴数>,如:
6 .连接172.1.1.10 7000
5.如果成功,您将看到以下输出:
短信:连接
连接
短信:工作…
短信:准备好了
6.请求当前机器人关节位置CJNT命令:
CJNT
短信:工作…
JNTS 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000
短信:准备好了
7.执行自动配置配置力命令:
配置力
短信:工作…
请求机器人程序状态
当前机器人程序状态为#P_FREE
读取当前配置($config.dat)
读取完成,正在更新配置
添加变量COM_ACTION的定义
添加变量COM_ACTCNT的定义
添加变量COM_ROUNDM的定义
添加变量COM_VALUE1的定义
添加变量COM_VALUE2的定义
添加变量COM_VALUE3的定义
添加变量COM_VALUE4的定义
添加变量COM_E6AXIS的定义
添加变量COM_FRAME的定义
添加变量COM_POS的定义
添加变量COM_E6POS的定义
已经更新了配置行:添加了11行,删除了0行,更新了0行,总共659行
检查是否存在旧的备份文件($config.bak)
旧备份文件存在,正在删除
创建新的备份文件($config.bak)
备份完成,写入新配置
成功写入新配置
检查程序文件是否存在(RoboDKsync543.src)
程序文件不存在
编写机器人系统程序文件
配置完成
短信:准备好了
8.现在你的机器人已经准备好工作了,你要做的就是选择并运行程序RoboDKsync543.src。
接下来的步骤是手动设置处理机器人运动的主程序:
1.添加以下全局变量的声明:
为此,找到并修改文件"的方式呈现:\ R1 \ SYSTEM \ CONFIG.DAT美元“通过库卡HMI。文件夹"的方式呈现:\ R1 \,也可以从C: \驱动器在以下Windows路径:"C: \的方式呈现\机器人\方式呈现\”。
INT COM_ACTION = 0
INT COM_ACTCNT = 0
真正COM_ROUNDM = 0
真正COM_VALUE1 = 0
真正COM_VALUE2 = 0
真正COM_VALUE3 = 0
真正COM_VALUE4 = 0
Decl e6axis com_e6axis
删除com_frame
声明pos com_pos
删除e6pos com_e6pos
2.复制KUKA SRC程序RoboDKsyncVER.src到文件夹的方式呈现\ R1 \程序。的版本文件名中的后缀表示程序的版本(例如,RoboDKsync543.src)。
3.手动启动RoboDKsyncVER.src编写程序,使机器人听取来自计算机的命令。
如果RoboDKsyncVER.src程序未运行时,如果C3 Bridge Server在机器人控制器中运行,RoboDK仍将能够读取机器人关节。