发那科机器人
机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间使用机器人驱动程序,可以直接在机器人上运行模拟(在线编程)。更多信息请参见机器人司机部分。
RoboDK可以与发那科机器人建立连接,通过RoboDK在连接的PC上自动移动机器人。这允许使用RoboDK在机器人上运行在线编程和调试选项。可以通过标准的以太网连接(TCP/IP)建立连接。
按照以下步骤设置Fanuc的RoboDK驱动程序:
1.2022世界杯国家队名单下载发那科驱动程序文件并将以下机器人程序传递给机器人控制器:
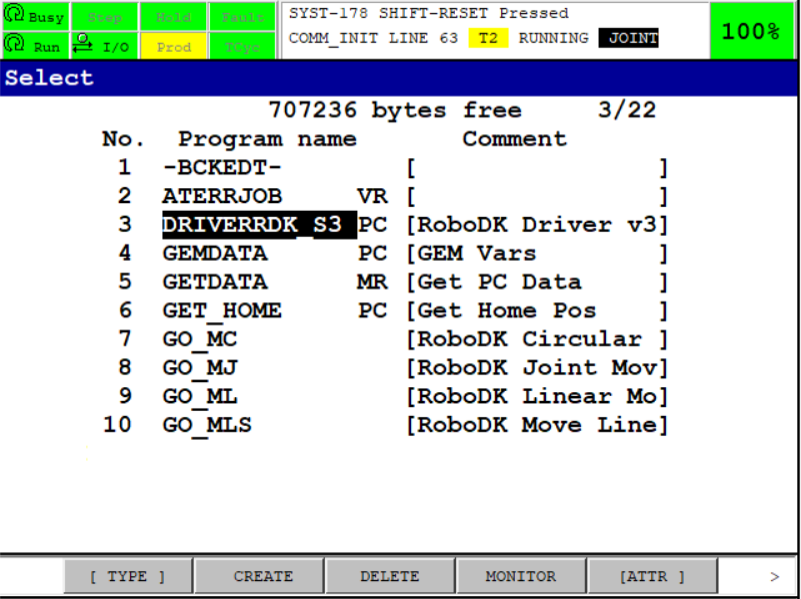
一个。RDK_S3。个人电脑➔这是通过S3(套接字通信端口号3 - S3)管理通信的主要程序。确保选择正确的版本(最新的Fanuc机器人控制器需要使用V9文件夹下的版本)。
b。GO_MJ。TP
c。GO_ML。TP
d。GO_MC。TP
e。GO_PROG。TP
按照以下步骤在机器人教学挂件上准备发那科机器人和RoboDK之间的通信:
1.选择菜单-(下)系统类型变量.
一个。选择HOSTS_CFG美元(按住shift键同时选择向下键可以帮助你更快地向下滚动)
b。选择3号
c。集SERVER_PORT美元到2000年
(美元HOSTS_CFG SERVER_PORT美元[3]= 2000)
2.选择Menu-Setup
3.选择【类型】主机通讯
4.选择[显示]服务器
5.选择“S3”进入.
一个。集协议名称来SM
b。在端口名称,如果有多个端口可用:将“端口”设置为P3(或相应的端口)。
c。设置不活动超时来9999
d。将“启动状态”设置为(选择)开始
e。将当前状态设置为开始:
为此,选择[行动]——把,然后[行动]实体法
6.启动程序RDK_S3:
一个。选择选择按钮从教学挂件。
b。向下滚动到RDK_S3程序
c。选择Enter(教学挂件上的按钮)
d。选择Shift-Reset和Shift-Forward来启动程序
您应该在教学挂件上看到RUNNING消息。如果程序运行失败,很可能是你没有一个机器人选项(电脑接口或用户套接字消息)或者您没有使用正确版本的PC程序。
7.在RoboDK中输入机器人的IP地址,选择“连接”连接机器人。