日本电装机器人
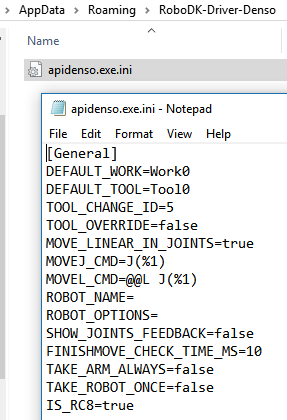
电装的RoboDK驱动程序可以高度定制,以实现特定的行为。此自定义可以通过编辑ini文件位于:
% APPDATA % / RoboDK-Driver-Denso / apidenso.exe.ini
这些定制允许指定运动类型或能够同时驱动多个机器人。任何文本编辑器都可以用来修改这个文件。
可配置的变量如下:
●DEFAULT_WORK -默认使用的工作对象(可变字符串)。
●DEFAULT_TOOL—默认使用的工具变量。
●TOOL_CHANGE_ID -当我们设置一个新工具(例如5=Tool5)时使用的备用工具变量。
●move_linear_in_joint -设置为false以提供线性运动作为笛卡尔目标。
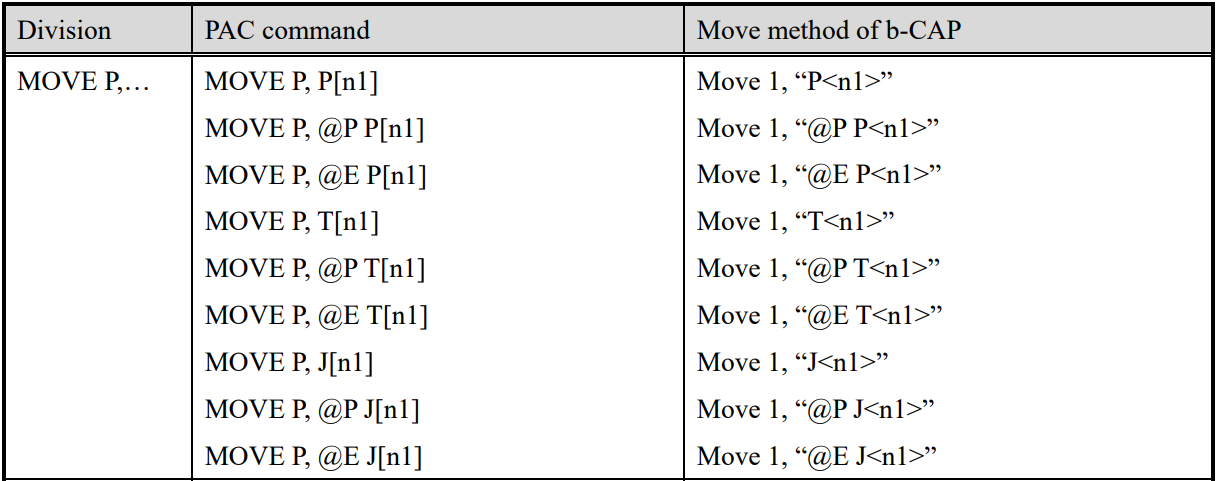
●MOVEJ_CMD -发送一个联合运动(MoveJ)的命令。下表提供了允许的选项。
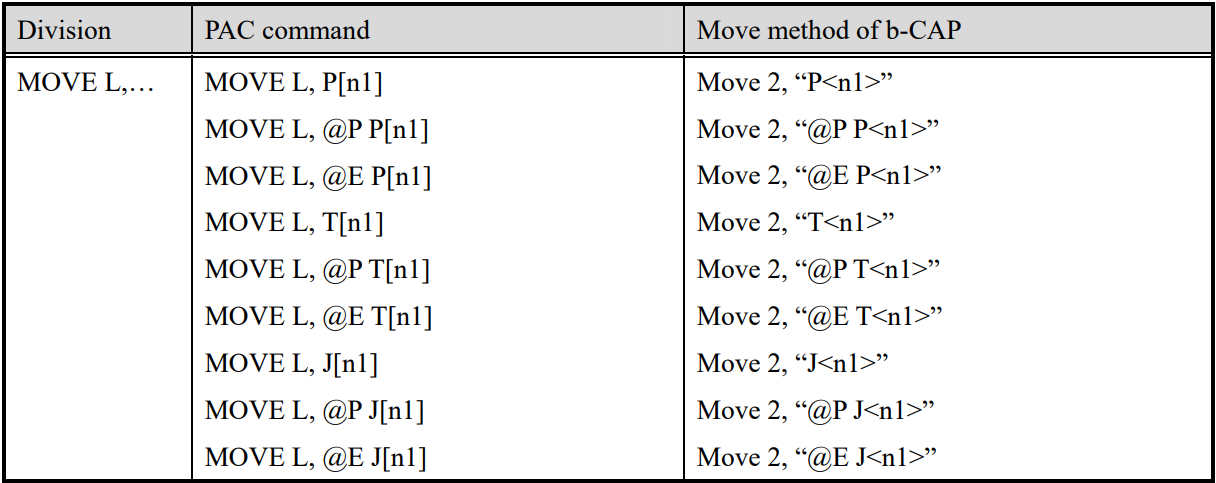
●MOVEL_CMD -发送线性移动(MoveL)的命令。下表提供了允许的选项。
●ROBOT_NAME—机器人的名称。指定此名称可选择控制器的特定机器人
●ROBOT_OPTIONS-机器人选项,以获得机器人资源。例如,如果我们使用的是控制器的从机器人,我们必须指定ROBOT_OPTIONS= " ID=1 "。如果我们想使用主机器人(主机器人),ID必须为0(默认)。
●SHOW_JOINTS_FEEDBACK-设置为true,在屏幕上实时看到机器人反馈(性能可能会变慢)。
●FINISH_MOVE_CHECK_MS-设置在显示关节反馈时,机器人位置在屏幕上刷新的速度。
●TAKE_ARMS_ALWAYS-设置为true,每次运动后保持控制器资源,直到机器人断开连接(更快,但可能导致意外结果)。
●TAKE_ROBOT_ONCE-设置为true,当机器人连接时,每次移动后都保留机器人资源(更快,但可能导致意想不到的结果)。
●IS_RC8-设置为false以正确连接RC7和旧的Denso控制器。