ISO9283性能测试
路径准确性测试完成后,可以通过选择获得PDF报告制作PDF报告,从路径验证窗口。这将生成一个PDF,其中包含一些关于路径精度、速度和加速度的统计数据和图形。
下面的图像显示了前面章节中准备的示例测试的结果。在这个例子中,ISO9283程序在两种不同的模式下运行:
●手动模式在75毫米/秒的速度
●自动模式300毫米/秒的速度
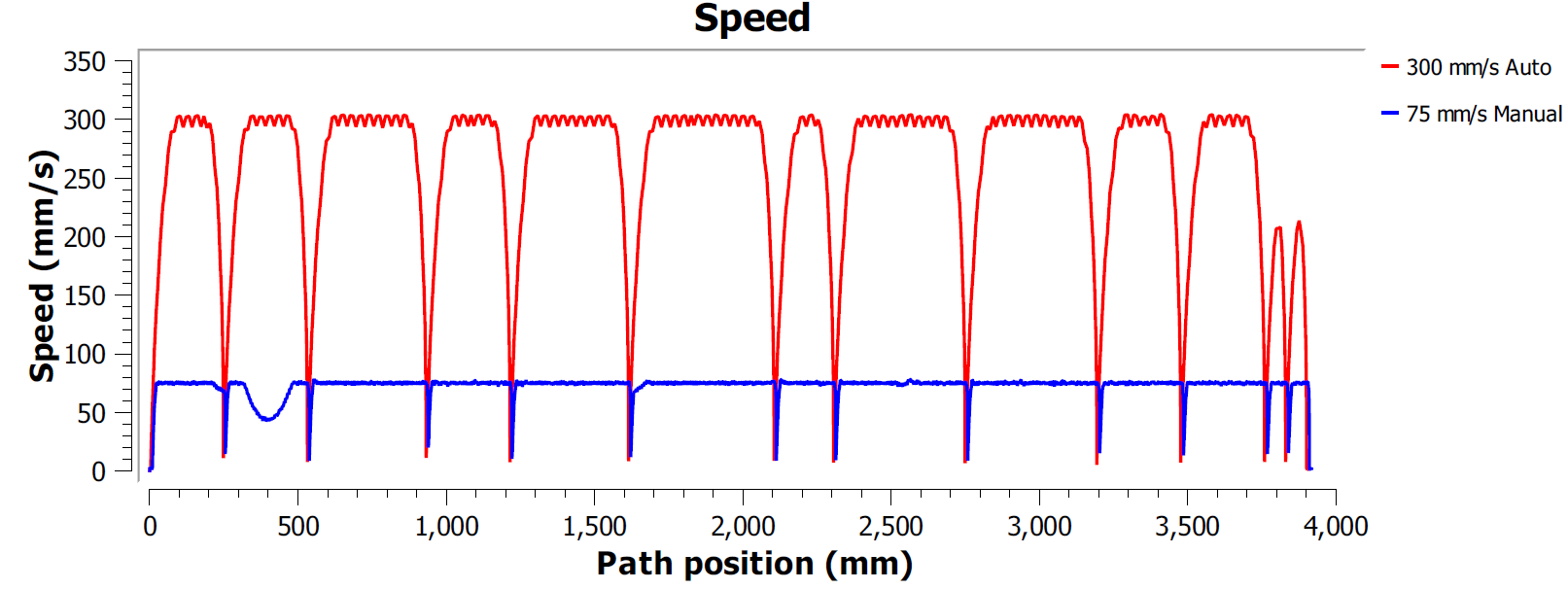
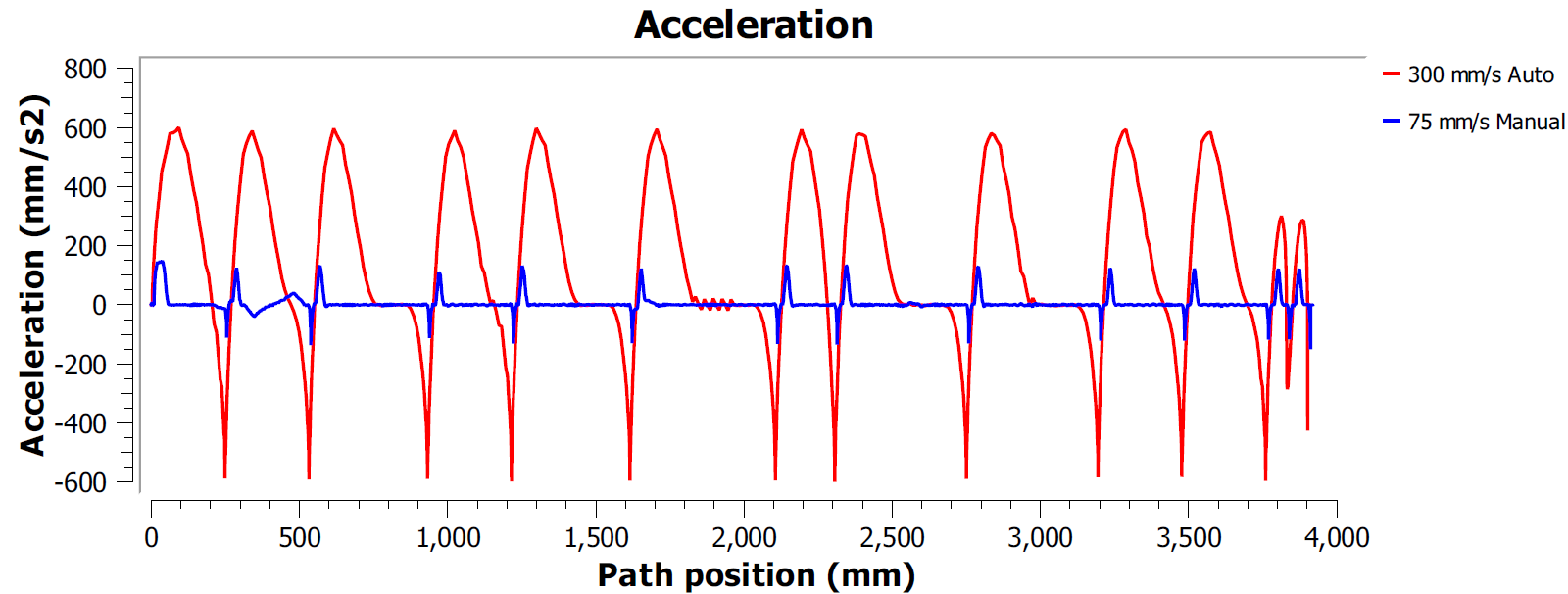
在本例中,两个程序都是使用好精度选择。这意味着机器人将在每个点停下来,以使路径尽可能准确。在这种情况下,通常会观察到沿路径的高加速和高减速,因为在每条线或圆运动(角)的末端速度必须为零。
大多数机器人品牌都提供舍入选项,通过平滑边缘来避免这种影响。例如,ABB将其称为ZoneData,允许指定控制器允许平滑边缘的精确区域;发那克将其称为CNT,允许指定与速度成比例的平滑百分比;库卡选项提供带有C_DIS标志的$ADVANCE指令;Universal Robots允许指定混合半径来平滑边缘)。
因此,路径精度测试允许在保持平滑速度的同时保持接近路径边缘的可接受精度水平之间找到一个很好的折衷。
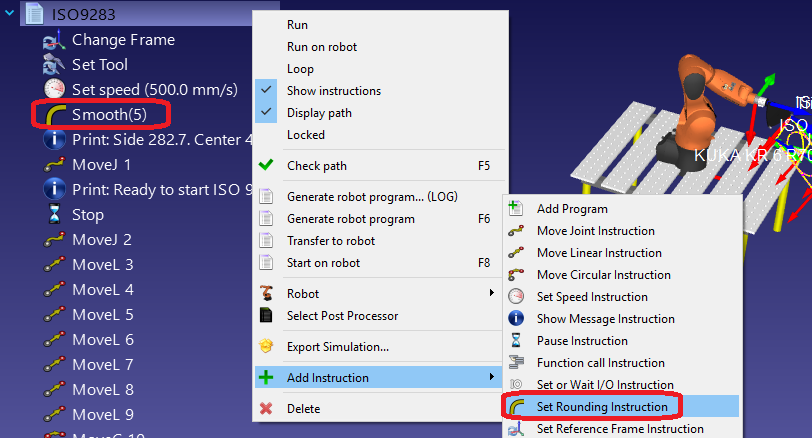
在RoboDK中可以指定舍入参数以及程序速度。为这样的测试编辑程序:
1.右键单击程序
2.选择显示说明
3.选择第一条或第二条指令
4.选择程序➔设置舍入指令指定舍入精度
5.选择程序➔设定速度指令指定速度