ISO9283性能测试
建议在RoboDK中搭建真实安装的虚拟环境(离线安装),为测试准备路径和位置。这可以在安装机器人和跟踪器之前完成,只需使用安装了RoboDK的计算机。RoboDK校准和路径验证设置示例可以从以下文件夹下载:2022世界杯国家队名单
//m.sinclairbody.com/2022世界杯国家队名单downloads/calibration/
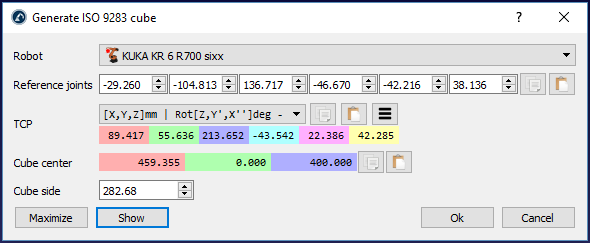
RoboDK有一个实用程序来生成配置和推荐路径,如ISO9283标准所述。要使用此实用程序:
1.公用事业公司➔创建ISO 9283多维数据集(目标和路径)
2.输入参考关节(刀具面对跟踪器的机器人位置)
3.调整立方体的位置和大小
4.选择OK
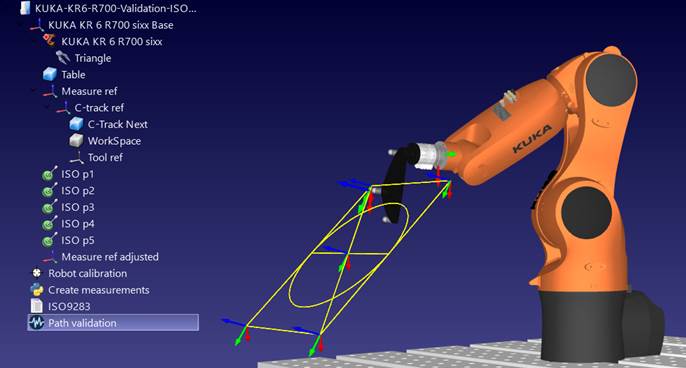
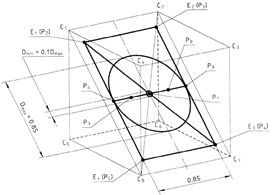
这将创建ISO规范所描述的5个目标,以及路径精度测试推荐的路径。这些目标和路径保持在机器人前方的立方体内。我们可以设置所需的立方体边,以及移动中心(目标“ISO p1”)和定义路径方向的参考关节。还可以最大化立方体的大小,以找到适合机器人工作空间的最大立方体。
具有机器人校准和机器人验证选项的样站如下图所示。