机器人球杆测试
介绍测量滚珠条的操作步骤。
你应该有两个机器人程序:
●BallbarSetup:该程序允许将球杆测试的中心(中心工具杯)设置在我们记录机器人关节的同一位置。
●BallbarTest:本程序是围绕中心工具杯的圆形路径,用球棒进行测量采集。
为了确保中心工具杯在正确的位置,我们必须运行程序BallbarSetup。机器人将以线性方式移动到中心点。然后我们必须放置并锁定磁性支架。
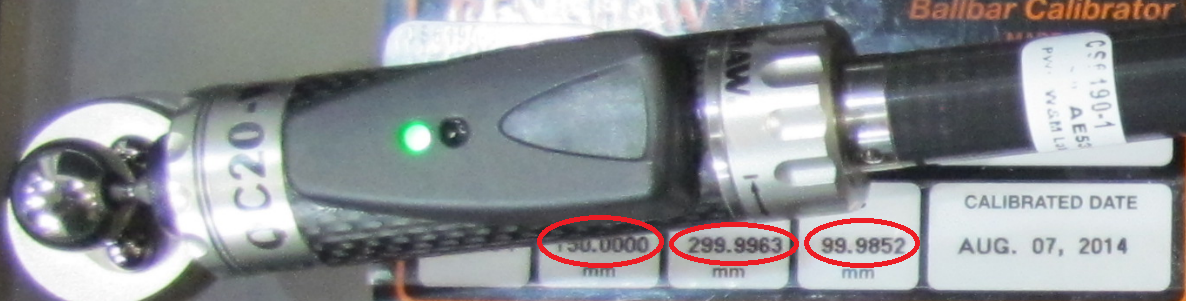
我们必须确保我们已经正确输入了球棒套件的母材参数(见下图)。这些值必须插入到“球杆参考距离”中。,从测试参数菜单中。QC20-W球棒将能够测量这些距离±1毫米,精度为1微米。这种精度对于工业机器人来说是足够的,但在某些情况下测量世界杯2022美洲预选赛直播范围会受到限制。对于RCS L-90,您可以复制目标距离(半径),因为参考距离无关紧要。
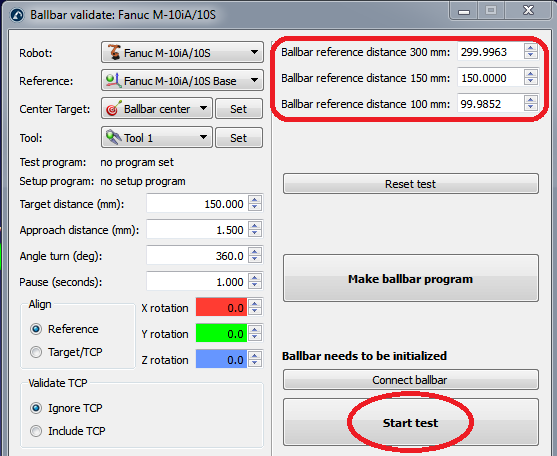
我们可以通过选择“start test”开始测试(之前不需要选择“Connect ballbar”)。将出现一个显示ballbar连接状态的新窗口。如果未检测到ballbar或存在某些问题,则必须关闭ballbar连接窗口,关闭ballbar设备,然后将其重新打开,然后重试开始测试。如果问题仍然存在,请确保您有适当的连接(蓝牙或USB)。RCS L-90提供了额外的功能,并将指示设备是否需要自导或校准。
一旦与球杆建立连接,RoboDK将指导用户遵循以下步骤:
1.用为测试选择的距离初始化球杆。
2.将机器人移动到开始位置(程序将暂停,然后继续)
3.然后使用者必须将球杆放在机器人上。
4.在计算机屏幕上选择OK启动测试。除非我们选择继续使用机器人教学吊坠,否则机器人不会移动。
5.如果一切正确,将出现一个新窗口,显示球杆当前测量值。
6.我们可以继续让机器人程序沿着路径移动。
7.当机器人完成运动后,我们可以停止测量(顺时针和逆时针)。
当测试完成后,RoboDK将显示测试结果,并要求用户将报告保存为PDF格式。
第4步对于检测测试的开始和结束很重要。这些限制是检测到的,因为机器人做了大约1.5毫米的径向运动来触发测量的开始和结束(在路径的起点和终点)。