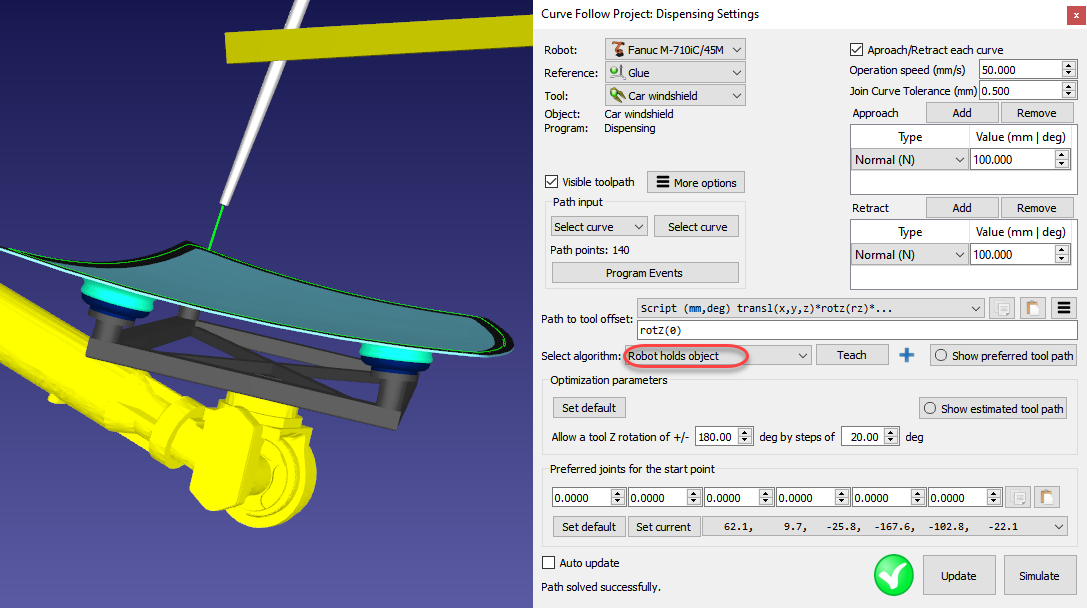
当制造操作发生时,机器人与刀具保持对象/刀具路径时,可以对机器人进行编程。这是有用的胶水点胶或抛光应用,例如。这种类型的机器人编程也被称为远程TCP。
选择机器人握住物体在选择算法下拉,以便将工具路径正确地放置在TCP引用上。其他的设置都是一样的加工项目具有恒定的刀具方向。
更多信息可在RoboDK插件为Autodesk融合部分。