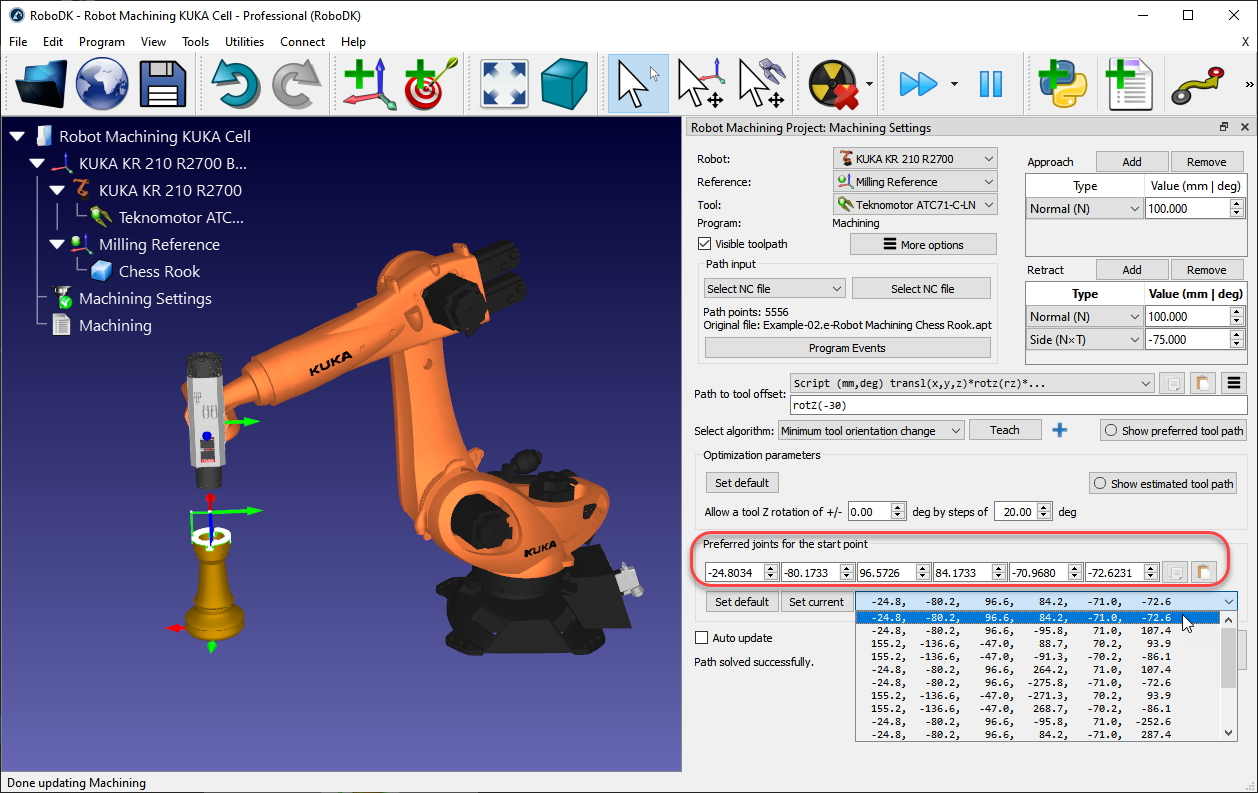
RoboDK自动选择更靠近首选启动关节的启动配置(首选关节为起点)。从这一点开始,机器人将遵循线性运动,因此机器人的构型不会改变。
下拉菜单将显示启动程序的所有可能的解决方案。如果需要,选择一个首选的机器人关节构型,并选择更新重新计算程序。