机器人标定(光学三坐标测量机)
首先,需要两个模型:一个工具模型和一个表示参考框架的模型。一个模型是一个对象,定义为相对于模型参考(工具或基准参考框架)对应于目标的点(X、Y、Z坐标)列表。
我们必须遵循以下步骤两次来定义工具和基本模型:
1.选择连接到VXElements连接➔连接Creaform的c轨道光学三坐标测量机.
2.选择“连接”,等待连接就绪。
如果VXElements需要,请确保校准跟踪器和HandyProbe。还要确保使用Creaform提供的VXTrack和VXModel软件选项。
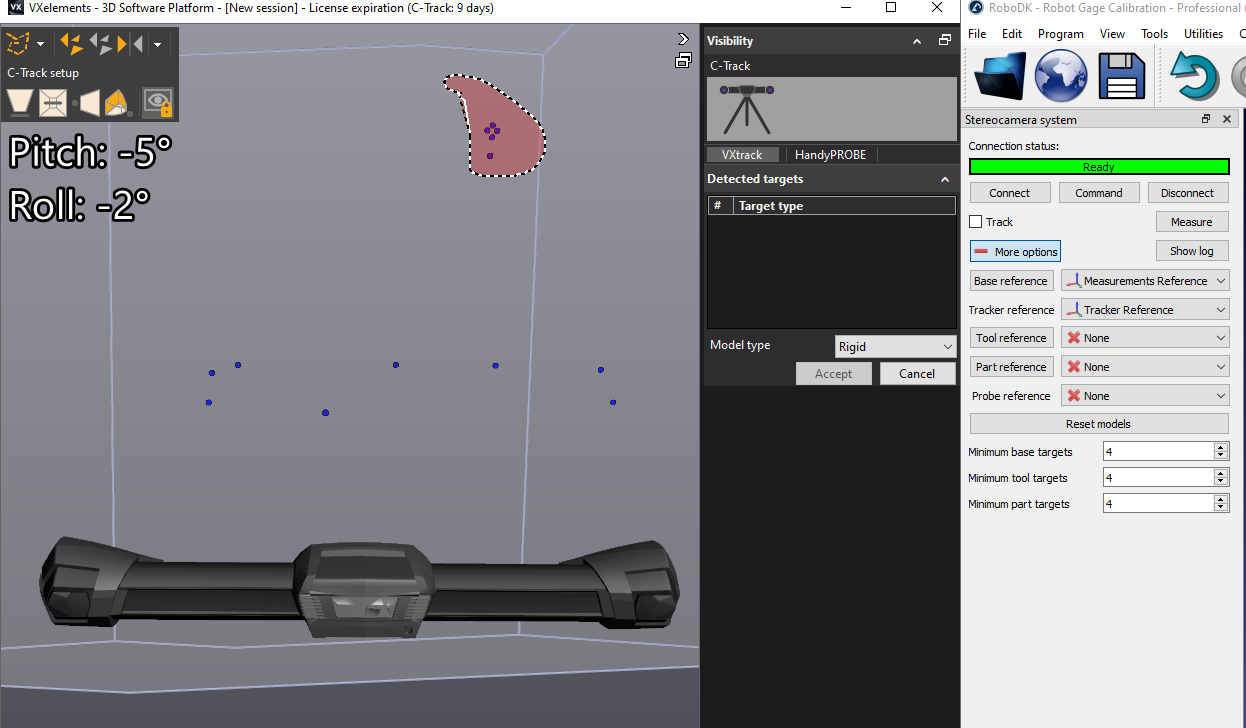
3.选择基础参考在RoboDK。VXelements将打开并显示可见的定位目标。您应该选择静态点。确保选择代表静态引用的所有点。你不应该包括可以移动的点。

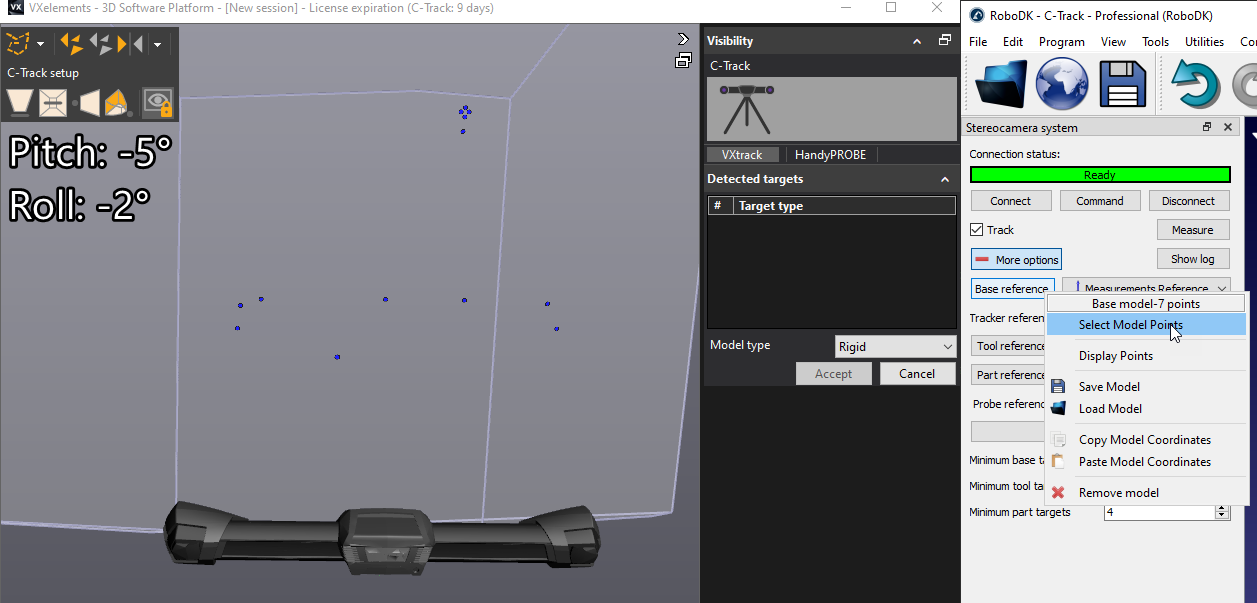
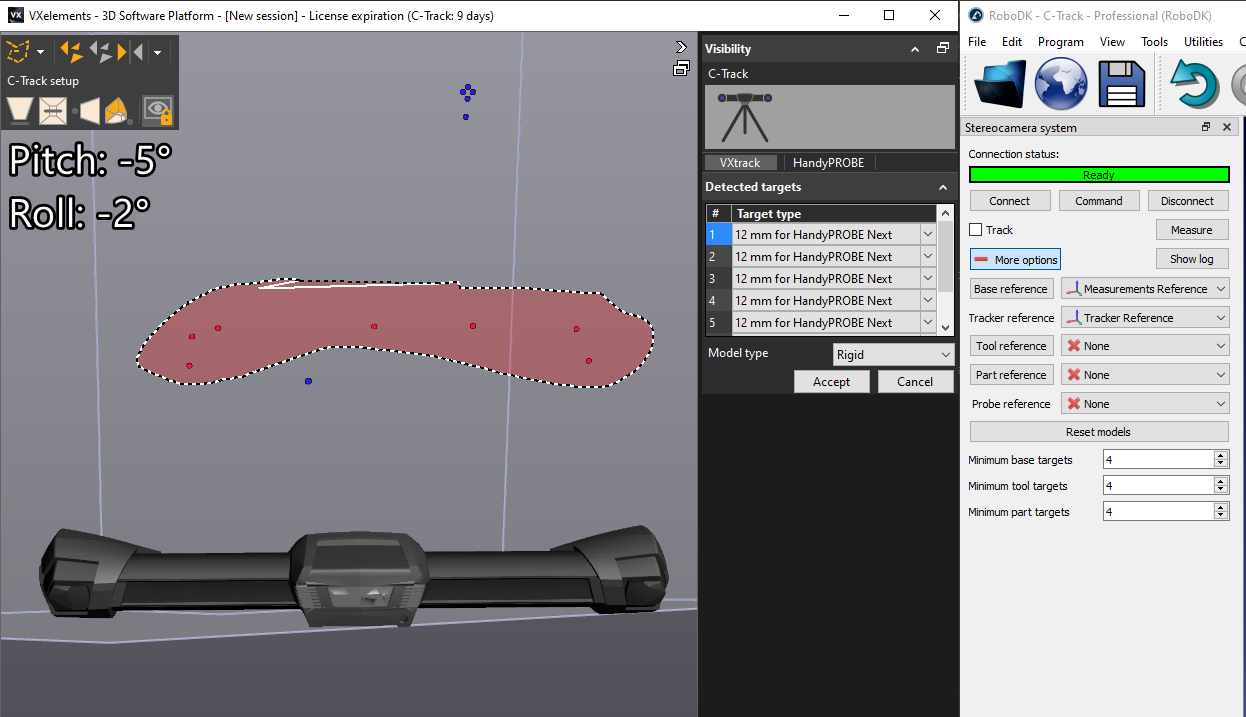
4.选择参考工具在RoboDK中,重复此操作,选择代表工具模型的点。
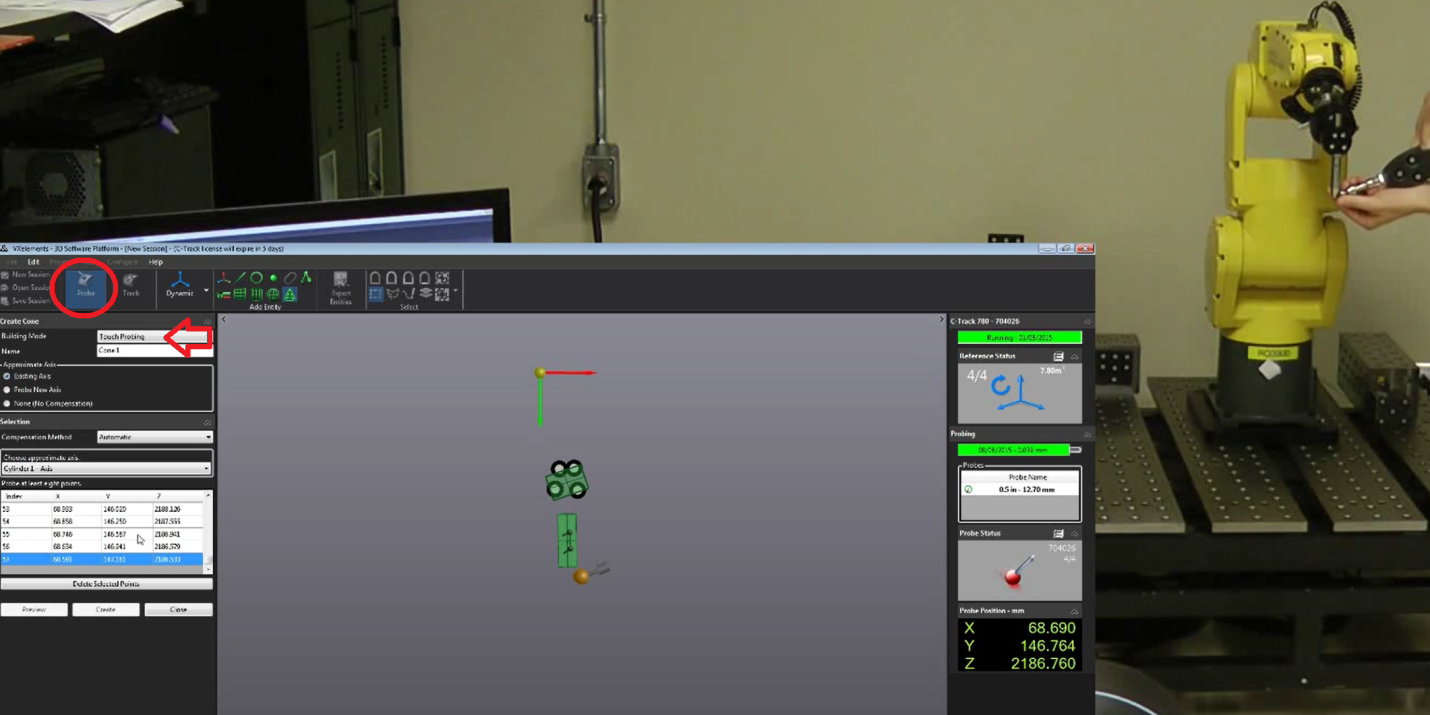
为了正确地移动对象的参考框架,我们必须使用HandyProbe并在虚拟VXelements会话中引入这些特性。所使用的模型必须定义为定位模型,以便根据该模型探测特征。可以探测点、线、面、圆柱体、锥体,并根据这些特征定义参考系。