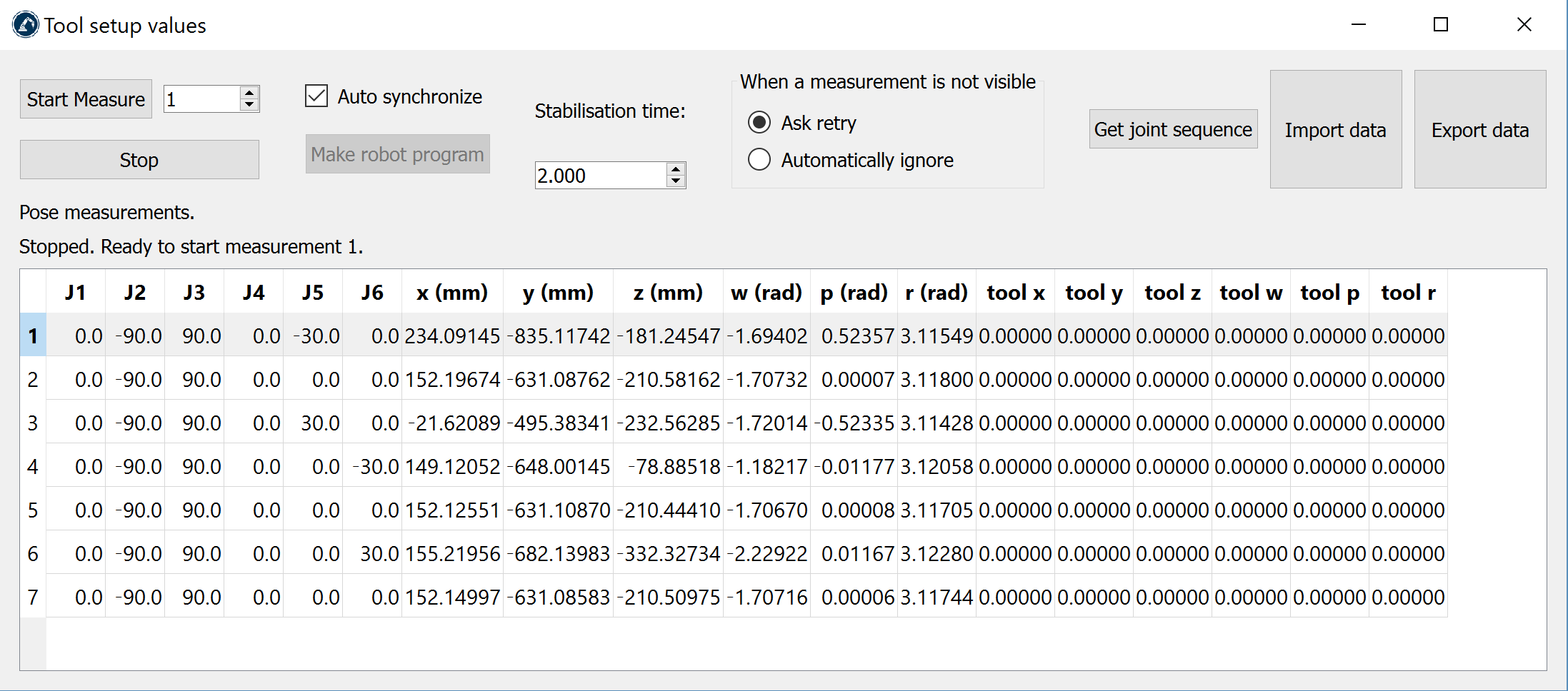
与前一节一样:选择测量在工具设置部分。将打开以下窗口。选择开始测量机器人将按顺序完成计划的测量。双击测量值以从该位置继续测量。
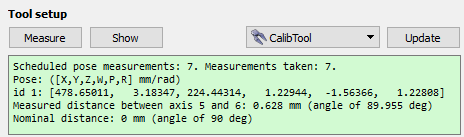
当程序完成时,摘要将显示校准的TCP(位置和方向)。TCP的定义(在下面的图像“Spindle”中)将自动更新。如果我们没有选择任何TCP,我们可以添加一个新的(选择“Program”)➔添加“空工具”),选择“重新计算”。