您可以选择遵循这些步骤来正确地为单元格的3D环境建模。
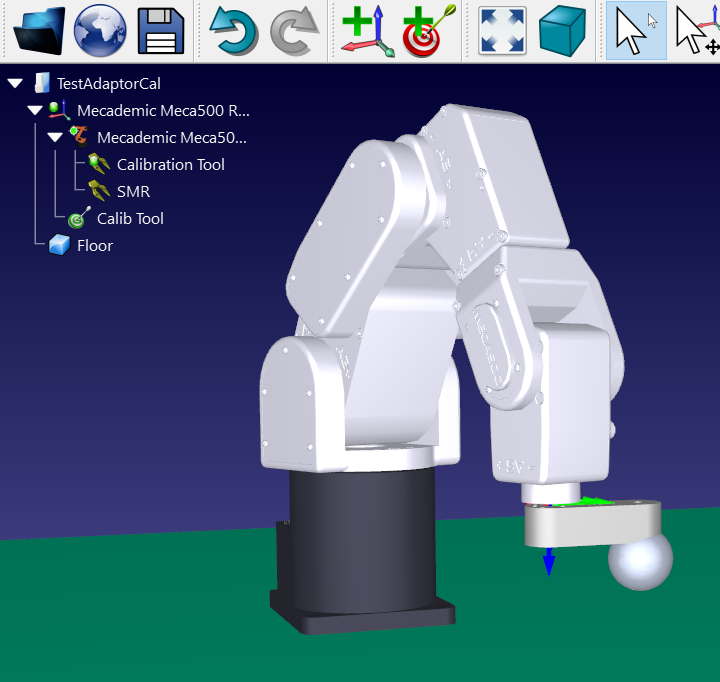
1.加载工具的3D模型并在RoboDK中创建工具。更多资料请参阅创建工具部分.
2.加载任何3D文件来建模单元格。您可以加载3D STEP, IGES, STL文件。更多信息请参见入门部分。