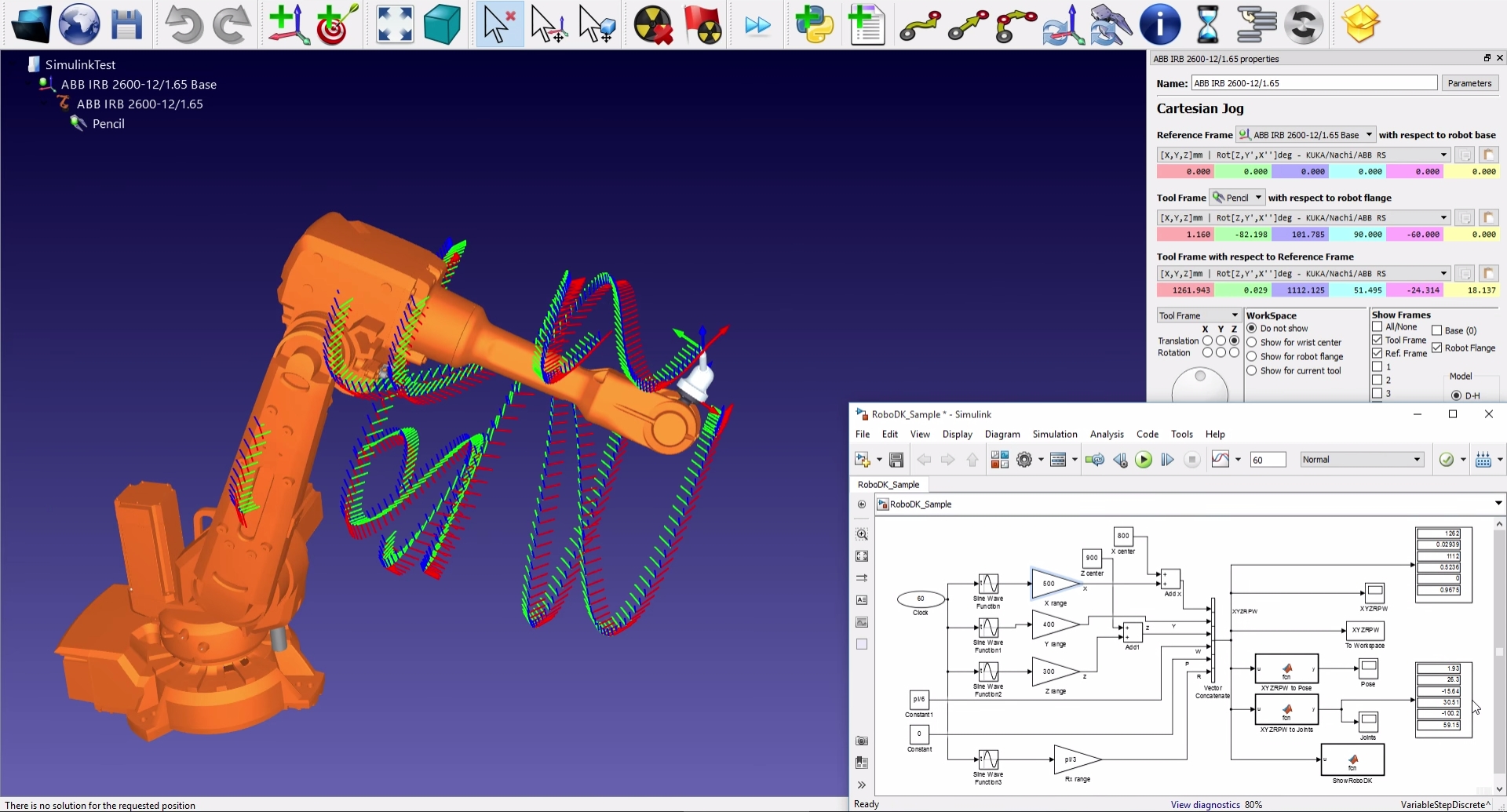
提供一个Simulink项目作为示例。在仿真中,机器人沿着一组任意生成的XYZ坐标移动。
下面的视频显示了运行模拟的结果:https://www.youtube.com/watch?v=7DDBMwa0-Oc