Rhino的RoboDK插件
每个Grasshopper组件都包含您可以自定义的特定设置。您还可以通过选择settings按钮更改适用于RoboDK命令(或工具栏按钮)的默认设置。
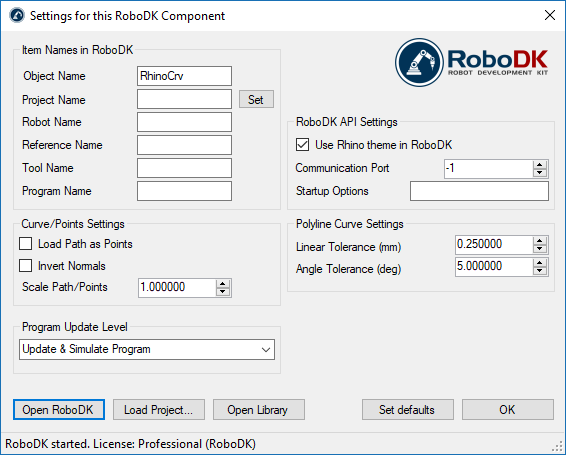
●对象名称-设置将在RoboDK中加载的曲线/点对象的名称。每次重新计算路径时,RoboDK中的对象都会被重写。如果对象的名称作为组件输入(O)提供,则忽略此值。
●项目名称-设置RoboDK工程/站的名称/路径。RDK文件)使用。如果文件已经加载,它将使用现有的项目。如果在RoboDK中打开的项目与文件名不匹配,则在指定完整路径时打开项目。
●〇机器人名称设置将在RoboDK中加载的机器人对象的名称。机器人名称必须与RoboDK站树中可见的名称匹配。将此值保留为空(默认值)以使用第一个可用的机器人。
●参考资料名称-设置参考系的名称,以放置相对于机器人的路径。该名称应与RoboDK站点树中的可见名称匹配。
●工具名称-设置要与机器人一起使用的工具(TCP)的名称以遵循路径。
该名称应与RoboDK站点树中的可见名称匹配。
●节目名称-设置要生成的程序的名称或路径。
●加载路径为点-选中此选项将对象创建为点和a点跟踪项目在RoboDK。这对于钻井等制造作业非常有用。取消选中此选项以将路径加载为曲线跟踪工程。
●反法线选中此选项以反转计算的表面法线。这将翻转机器人的刀具方向。
●使用犀牛主题在RoboDK -用Rhino主题启动RoboDK。这包括改变3D导航的鼠标行为和背景颜色。这些设置仅在RoboDK启动Rhino时适用。这些设置可以在RoboDK的Tools-Options菜单中更改。
●通信端口-设置与RoboDK通信的端口。如果使用不同的端口,可以同时运行多个RoboDK实例并使用不同的设置。当该值设置为-1(默认值)时,使用默认端口(20500)。
●启动选项-设置在RoboDK第一次启动时传递给它的参数。例如,要悄悄地启动RoboDK,你可以设置'/NOSPLASH /NOSHOW /HIDDEN'。即使不显示“RoboDK”,仍然可以生成程序。更多资料请参阅命令行章节。
●线性公差(mm) -将分割曲线的线性精度设置为一组点。
●角度公差(mm) -将分割曲线的角度精度设置为一组点。
按钮:
●〇打开RoboDK在RoboDK中打开一个项目…将打开一个带有其他选项的新窗口。
●负荷工程…加载你想要使用这个组件的RoboDK项目(RDK文件)。
●开放图书馆-打开RoboDK在线图书馆。
●设置默认值-设置组件的默认设置。
●好了,应用这些设置并关闭此窗口。不选择OK将不会应用您更改的任何设置。