Mastercam的RoboDK插件
选择更新所选操作生成所选操作的工具路径,并在RoboDK中进行仿真。

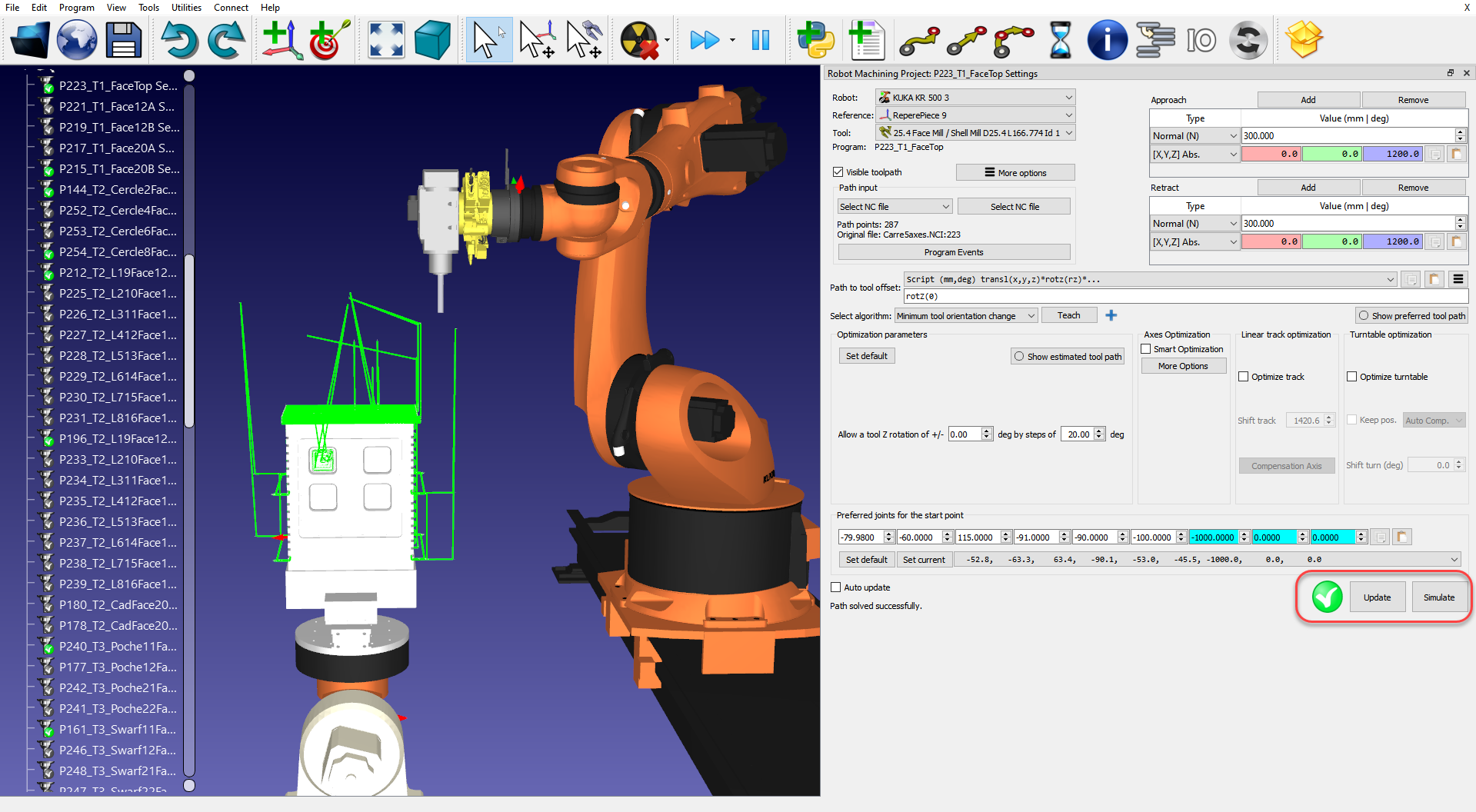
这个动作将加载RoboDK中选择的刀具路径进行机器人加工。默认情况下,每个加工操作将被分割为一个单独的机器人程序。
如果程序对所选机器人是可行的,将显示一个绿色的复选标记。如果有任何问题(如奇点、轴限制或到达问题),将显示一个红色标记,并显示该问题的消息。
双击机器人加工项目![]() 打开机器人特定于一个操作的加工设置。中提供了有关机器人加工设置的更多信息机器人加工部分。
打开机器人特定于一个操作的加工设置。中提供了有关机器人加工设置的更多信息机器人加工部分。
右键单击程序并选择运行来模拟它(或双击程序)。你也可以选择生成机器人程序(F6)获取需要加载到机器人控制器上的机器人程序。有关如何生成机器人程序的更多信息,请参见2022世界杯8强赛时间离线编程组。
如果需要,右键单击程序并选择选择后置处理器更改后置处理器。这一步可以帮助您定制生成代码的外观。有关选择和自定义后置处理器的更多信息,请参见后置处理器组。
例如,当您使用KUKA机器人时,RoboDK生成自动使用KRC2机器人的后置处理器(称为KUKA KRC2),但是,如果您有KRC4,则可以选择KUKA KRC4后置处理器。