Mastercam的RoboDK插件
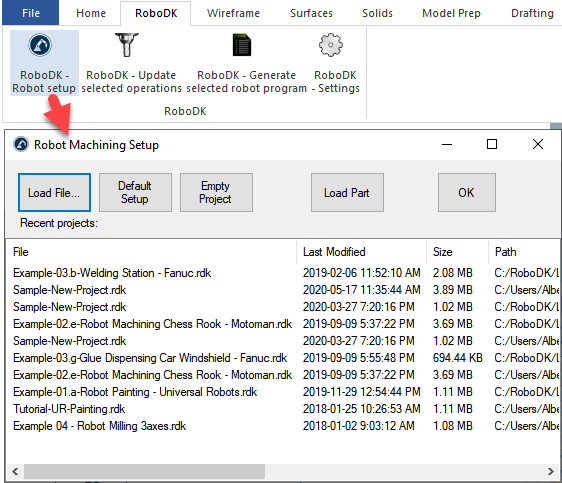
的机器人安装![]() 按钮打开项目管理窗口,允许打开现有机器人加工项目或设置新的机器人加工项目。机器人设置的目标是选择机器人,加载EOAT(臂端效应器,或TCP)并添加至少一个参考框架。以下选项可用:
按钮打开项目管理窗口,允许打开现有机器人加工项目或设置新的机器人加工项目。机器人设置的目标是选择机器人,加载EOAT(臂端效应器,或TCP)并添加至少一个参考框架。以下选项可用:
●加载文件:选择一个文件,用RoboDK打开它,并使用它作为您的Mastercam项目的默认项目。
●默认设置:用默认机器人、主轴和参考系设置新工位。该部件也会自动导出到RoboDK。
●空的项目:打开RoboDK与一个新的空站,让用户建立一个新的设置。中提供了关于从头开始设置新项目的更多信息入门部分。
●加载部件:将部件从Mastercam加载到RoboDK(部件将保存为STL文件并自动加载)。所有可见的固体和表面都将被加载。
参观机器人加工段有关构建新设置的详细信息。
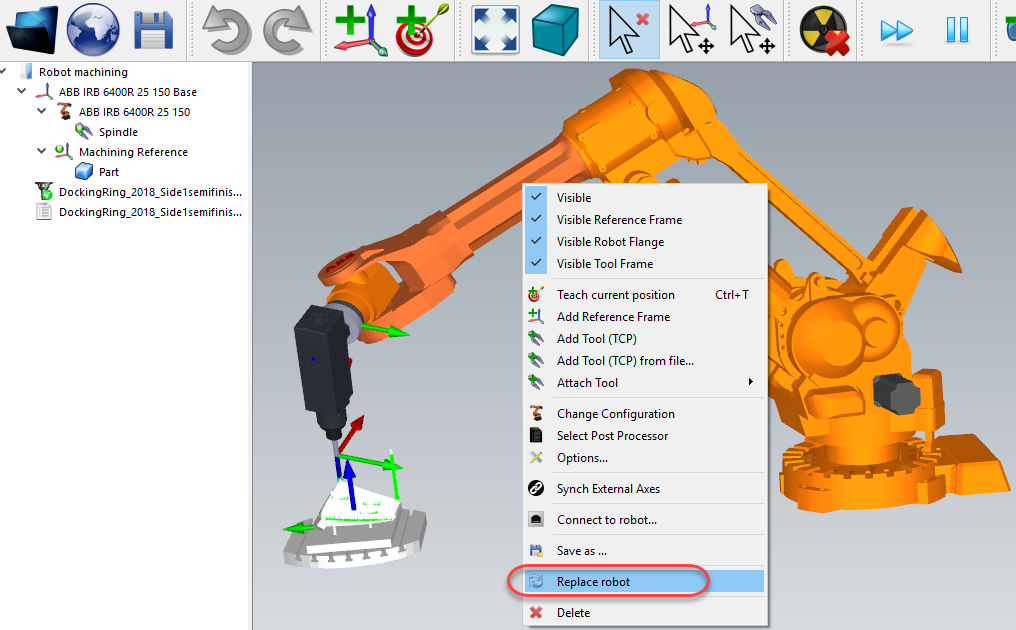
你可以很容易地改变机器人,修改工具和/或参照系。作为示例,请按照以下步骤更改机器人:
1.右键单击机器人
2.选择更换机器人(如图所示)
3.选择新机器人
默认情况下,RoboDK安装程序只提供了一些机器人,但是,可以从2022世界杯国家队名单在线图书馆。
中提供了有关添加机器人工具的更多信息入门部分。
持有Alt + Shift移动机器人工具(TCP)。这对于在教授目标之前设置机器人的姿势很有用。
通过选择保存项目以保留更改文件➔保存站点(Ctrl+S)。