Mastercam的RoboDK插件
选择RoboDK设置![]() 打开Mastercam的RoboDK插件的相关设置。
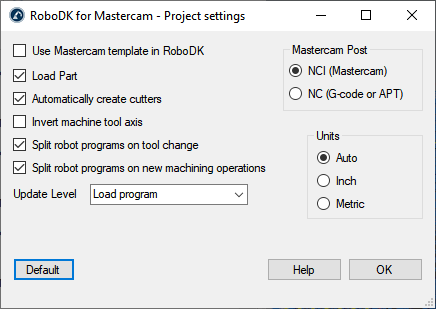
打开Mastercam的RoboDK插件的相关设置。

除此之外,您可以修改以下选项:
1.使用Mastercam模板代替RoboDK模板(RoboDK中的3D导航和颜色模板将与Mastercam风格匹配)。在RoboDK中,请确保取消勾选忽略从3更改的设置理查德·道金斯方应用程序在“工具”菜单中➔选项➔其他允许这个模板在RoboDK。
2.每次发布新的加工操作时,在RoboDK中加载和更新零件。只有可见的实体和表面才会被加载。
3.自动创建刀具刀具。在这种情况下,相对于机器人的第一个工具(刀架)将自动创建新工具,TCP将被相对于刀架的整体工具长度抵消。
4.检查选项反转机床轴允许您自动计算指向工具内侧的工具Z轴(而不是指向外部)。
5.使用NC文件(如APT或G-code)代替NCI文件。RoboDK可以读取以下文件来生成机器人仿真和程序:
一个。NCI文件(默认选项):在RoboDK中加载Mastercam原生工具路径。这是大多数操作的首选方法。
b。NC文件(g代码文件)。允许您使用RoboDK机器定义加载罐装钻周期(长手)。