接口
机器人目标允许您记录特定的机器人位置,以便机器人可以移动到该位置。
按照以下步骤添加新目标器并查看其附加信息:
●选择程序➔![]() 教学目标(Ctrl+T)创建新的目标器。
教学目标(Ctrl+T)创建新的目标器。
这将使用活动参考系记录机器人的当前位置![]() 以及活动的工具框架
以及活动的工具框架![]() .目标将被添加到活动参考框架中。
.目标将被添加到活动参考框架中。
●右键单击目标,然后选择更多选项…(F3)查看记录的姿态和关节值。
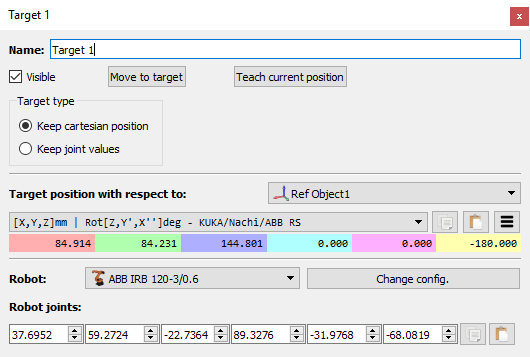
创建一个新目标记录TCP相对于笛卡尔空间中的参考系以及当前机器人轴。默认情况下,RoboDK将目标创建为笛卡尔目标(保持笛卡尔位置![]() ).在这种情况下,如果参考系被移动,机器人将尝试到达目标相对于该参考系的位置。
).在这种情况下,如果参考系被移动,机器人将尝试到达目标相对于该参考系的位置。
另一方面,可以在关节空间中指定目标(保持关节值![]() ).在这种情况下,目标是一个绝对的机器人位置,它不会因为参考系的移动而改变。
).在这种情况下,目标是一个绝对的机器人位置,它不会因为参考系的移动而改变。
通常的做法是使用联合目标来达到靠近工作区域的第一个接近位置,然后,笛卡尔目标确保在参考框架或刀具框架被修改时不会改变刀具路径。
可以看到其他配置与机器人达到相同的姿势。更多资料请参阅下一节.