您可以参照刀具(TCP)参照另一个刀具,例如,定义一个给定的位置,或者参照刀具或刀架放置刀具。
这些步骤假设必须在第一个TCP上沿Z轴150mm处添加第二个TCP:
1.右键单击机器人
2.选择添加工具(TCP).将出现一个名为Tool 2的新项目。
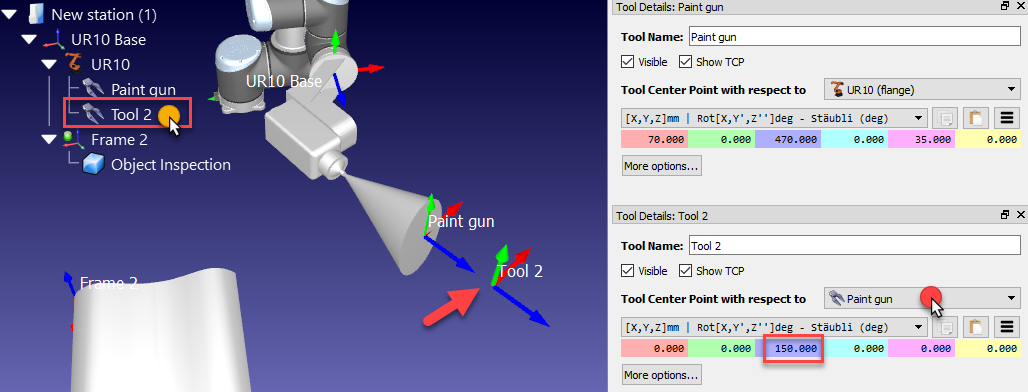
3.双击这个新的TCP
4.选择相对于的刀具中心点➔喷漆枪
5.输入坐标Z为150mm,并将其他平移和旋转设置为0。
这个相对于先前定义的TCP的新TCP将在本演示的下一节中删除。