在RoboDK中加载时,刀具的几何形状可能与机器人法兰(适配器参考框架)不正确对齐。
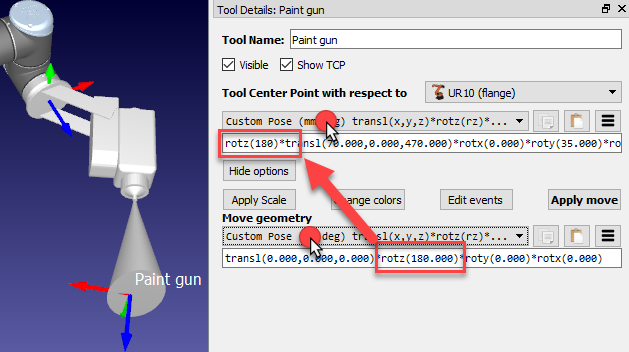
以下步骤假设犯了一个错误,并且工具绕Z轴安装了180度,因此应应用以下更正:
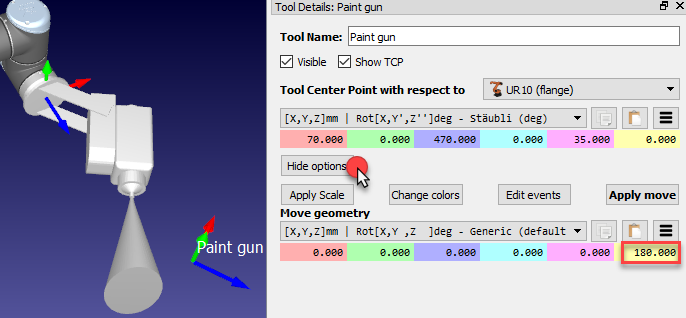
1.在工具详细信息窗口中选择更多选项
2.在油漆枪几何体的黄色区域输入180 (Z轴旋转),如下图所示。鼠标滚轮可以在每个箱子的顶部使用,以快速更新主屏幕上的位置。