开始
新的机器人工具(tcp)可以在RoboDK中加载或创建先前加载的3D几何图形。
按照以下步骤加载对象并将其设置为机器人工具:
1.选择文件➔![]() 开放(如以前的部分)
开放(如以前的部分)
2.选择油漆枪。STL文件将其作为对象添加(它将在机器人基础框架中添加)
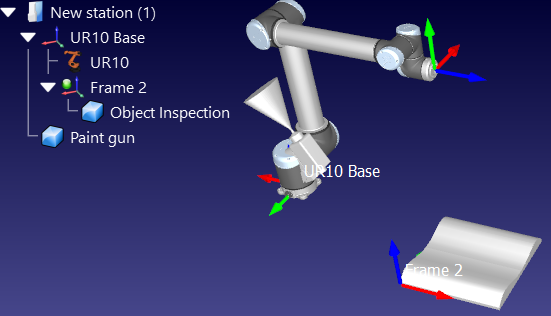
3.将对象拖放到站点树中的机器人项目上,如下图所示
新工具可以加载或保存为.tool格式。
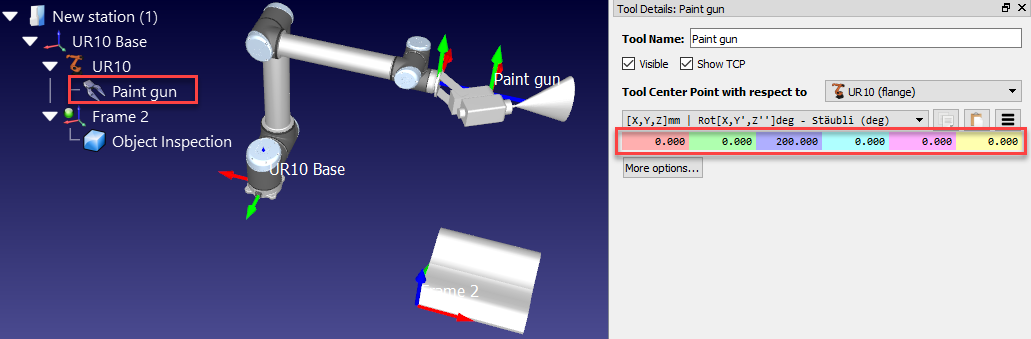
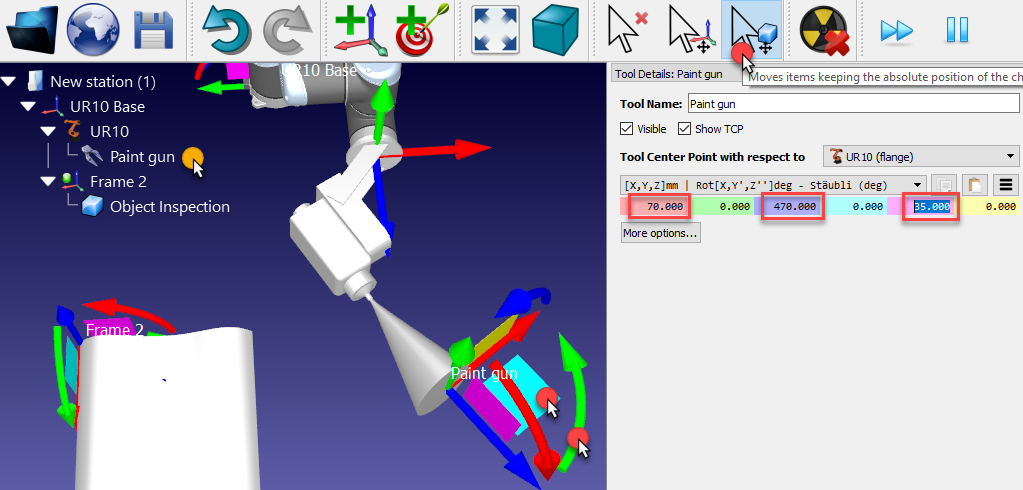
默认情况下,RoboDK将在位置[X,Y,Z]=[0,0,200] mm处定义TCP,这可以通过手动输入坐标和/或通过按住ALT+Shift键移动TCP来更改,如下图所示:
1.持有ALT + Shift或者从工具栏中选择突出显示的按钮
2.选择浅蓝色平面(TCP的XZ平面),将TCP大致拖向喷枪表面,如下图所示
3.选择绿色圆角箭头(围绕Y轴旋转),使Z轴指向外
4.一旦获得了坐标的估计值,就可以通过双击Paint gun对象手动修改这些值。鼠标滚轮可以在每个箱子的顶部使用,以快速更新主屏幕上的位置。
此时,该站可以保存:
1.选择文件➔![]() 省站(Ctrl + S)
省站(Ctrl + S)
2.将文件保存为Paint Test.rdk。窗口标题和站点名称将被更新
您可以参照刀具(TCP)参照另一个刀具,例如,定义一个给定的位置,或者参照刀具或刀架放置刀具。
这些步骤假设必须在第一个TCP上沿Z轴150mm处添加第二个TCP:
1.右键单击机器人
2.选择![]() 添加工具(TCP).将出现一个名为Tool 2的新项目。
添加工具(TCP).将出现一个名为Tool 2的新项目。
3.双击这个新的TCP
4.选择相对于的刀具中心点➔喷漆枪
5.输入坐标Z为150mm,并将其他平移和旋转设置为0。
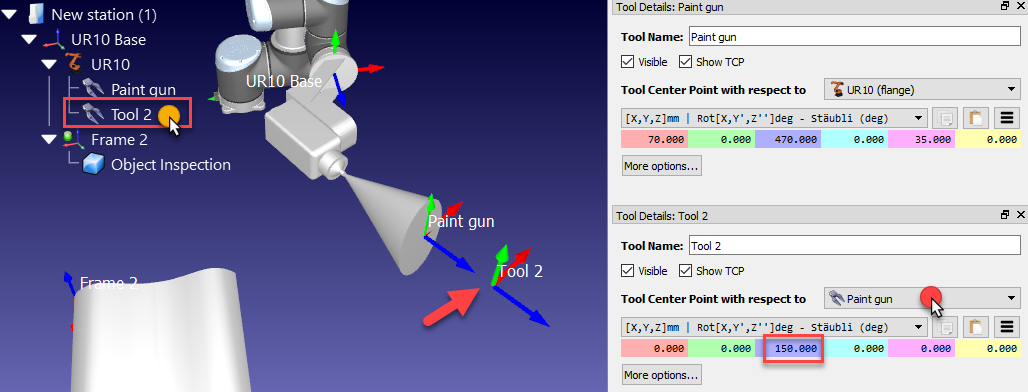
这个相对于先前定义的TCP的新TCP将在本演示的下一节中删除。
在RoboDK中加载时,刀具的几何形状可能与机器人法兰(适配器参考框架)不正确对齐。
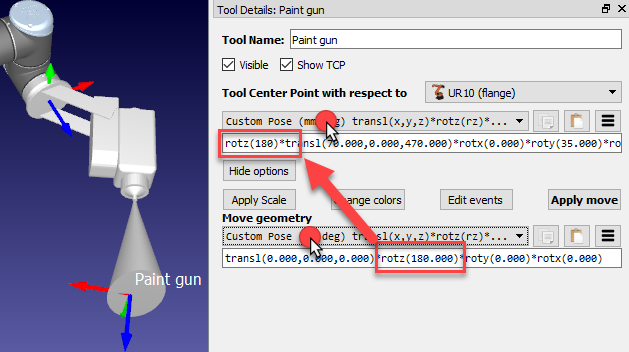
以下步骤假设犯了一个错误,并且工具绕Z轴安装了180度,因此应应用以下更正:
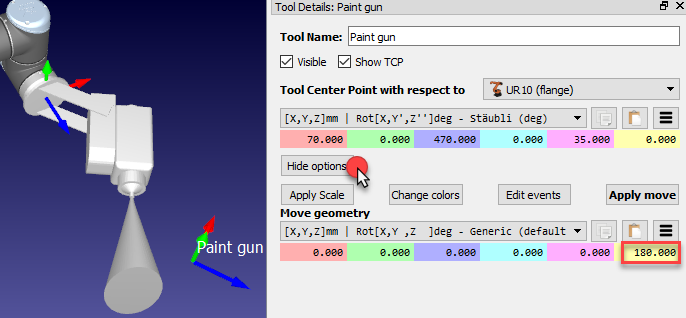
1.在工具详细信息窗口中选择更多选项
2.在油漆枪几何体的黄色区域输入180 (Z轴旋转),如下图所示。鼠标滚轮可以在每个箱子的顶部使用,以快速更新主屏幕上的位置。