Robot Machining (5x)
To make the transition between your robot machining jobs safer you can make the robot move to an approach position after each machining operation.
Follow these steps to create a new program calledGoHomeand move to this location after ach machining job is completed:
1.Create a new program by selectingProgram➔Add Programor select the corresponding button in the toolbar.
2.重命名程序按F2to something likeGoHome.
3.Select the program you just created.
4.Move the robot to a safe location and selectProgram➔Move Joint Instructionor select the corresponding button in the toolbar. This operation should create a new target on that location and add a move joints instruction to that target if the program was previously selected.
5.You can then make the robot move to this home target between each machining operation by right clicking the first program call instruction and selectingAdd Instruction➔Program call instruction.
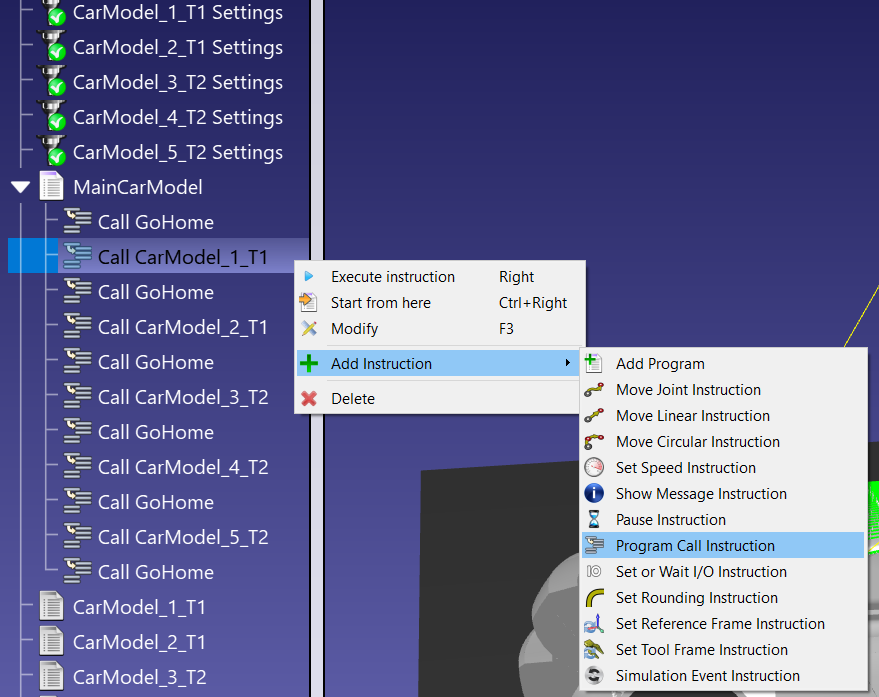
6.Enter the name of the program to go to (GoHome) and select OK.
7.You can thencopy/pastethis instruction within your program to quickly obtain the final result.
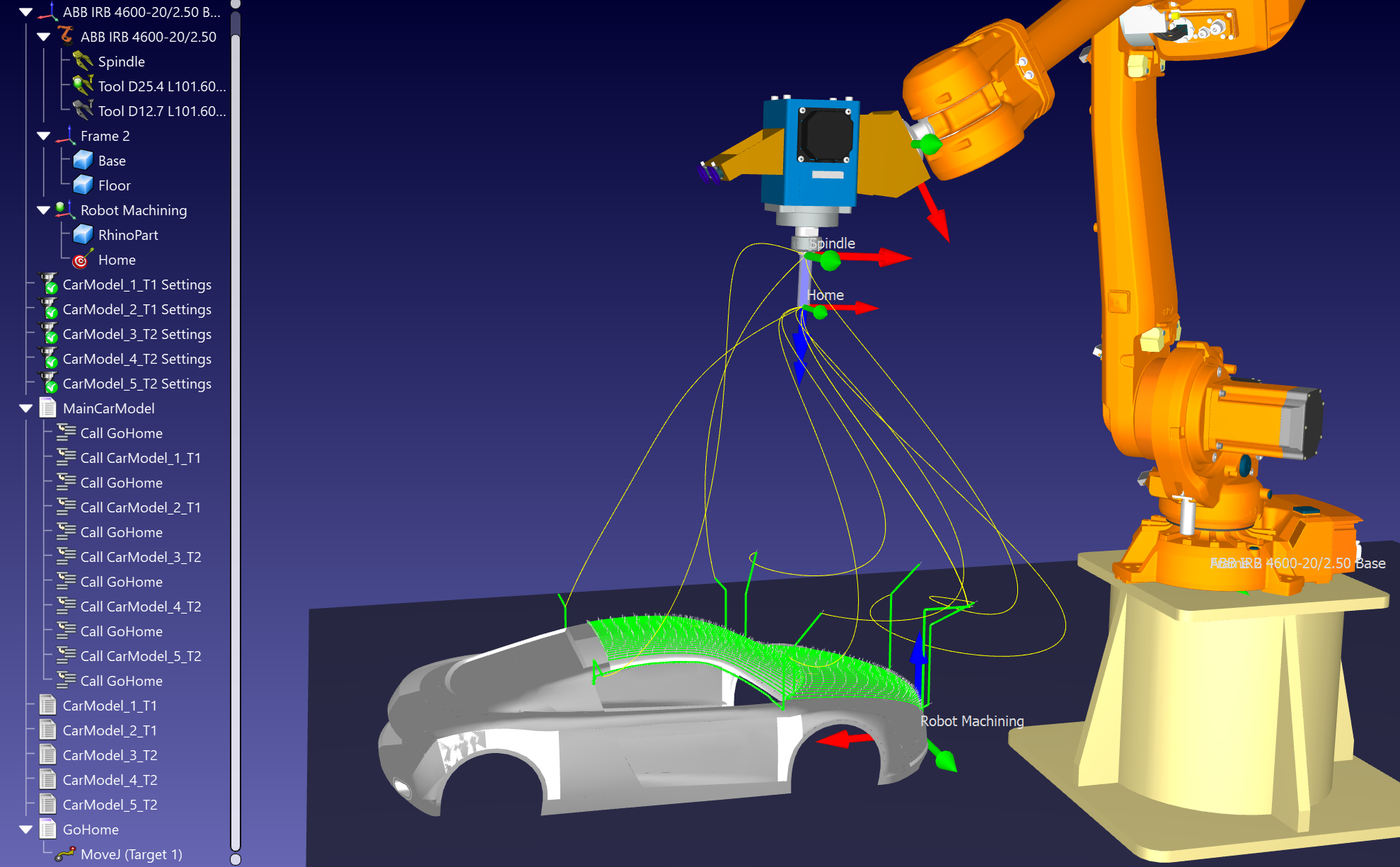
8.Right click the main program and selectDisplay pathto see the robot toolpath as a yellow line. This will help you visualize if the position of your approach target is suitable for your project.