Robot Machining
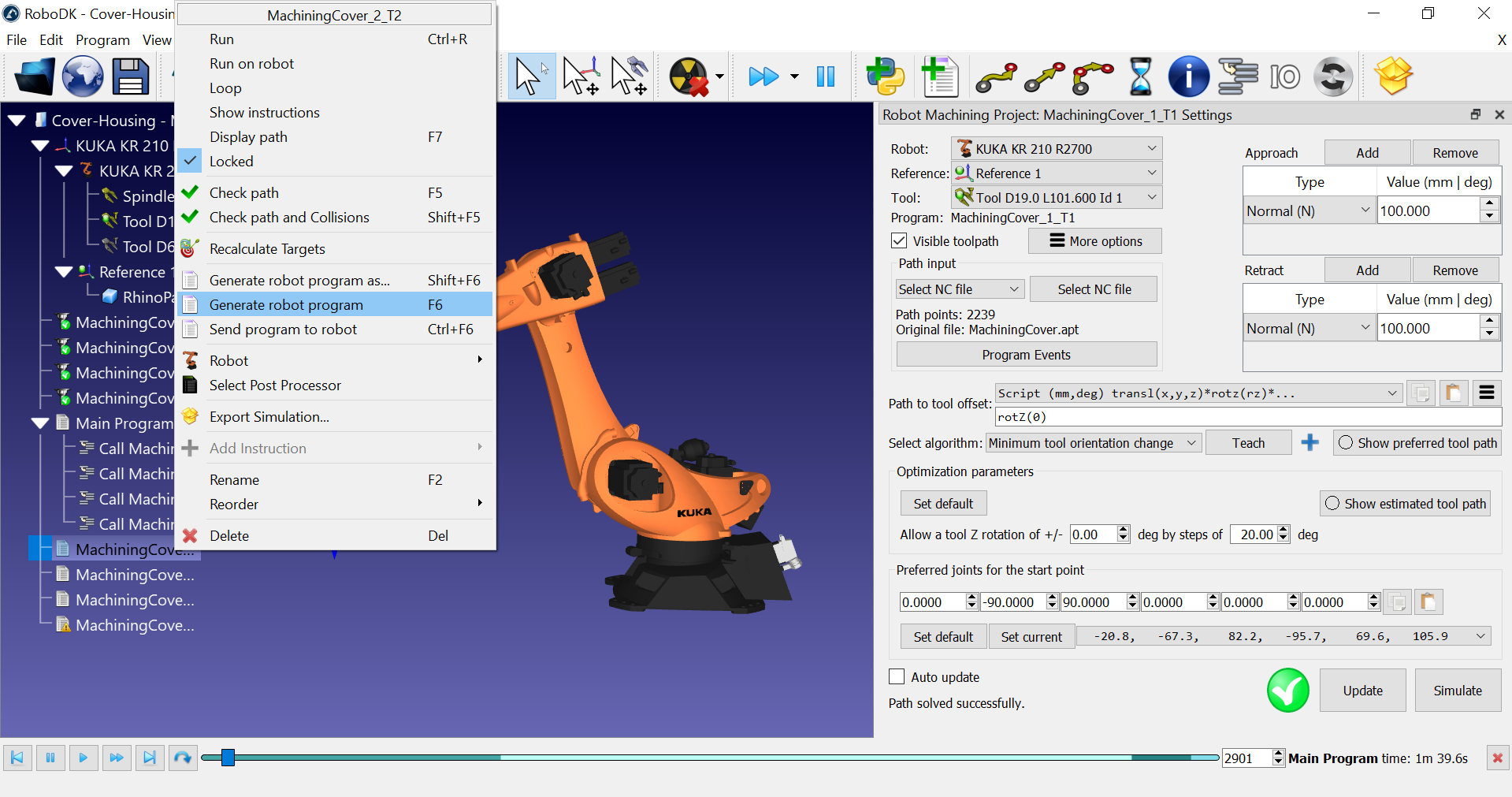
You can right click one or more programs and selectGenerate the robot programsto generate or update the robot programs (files) for your robot controller.
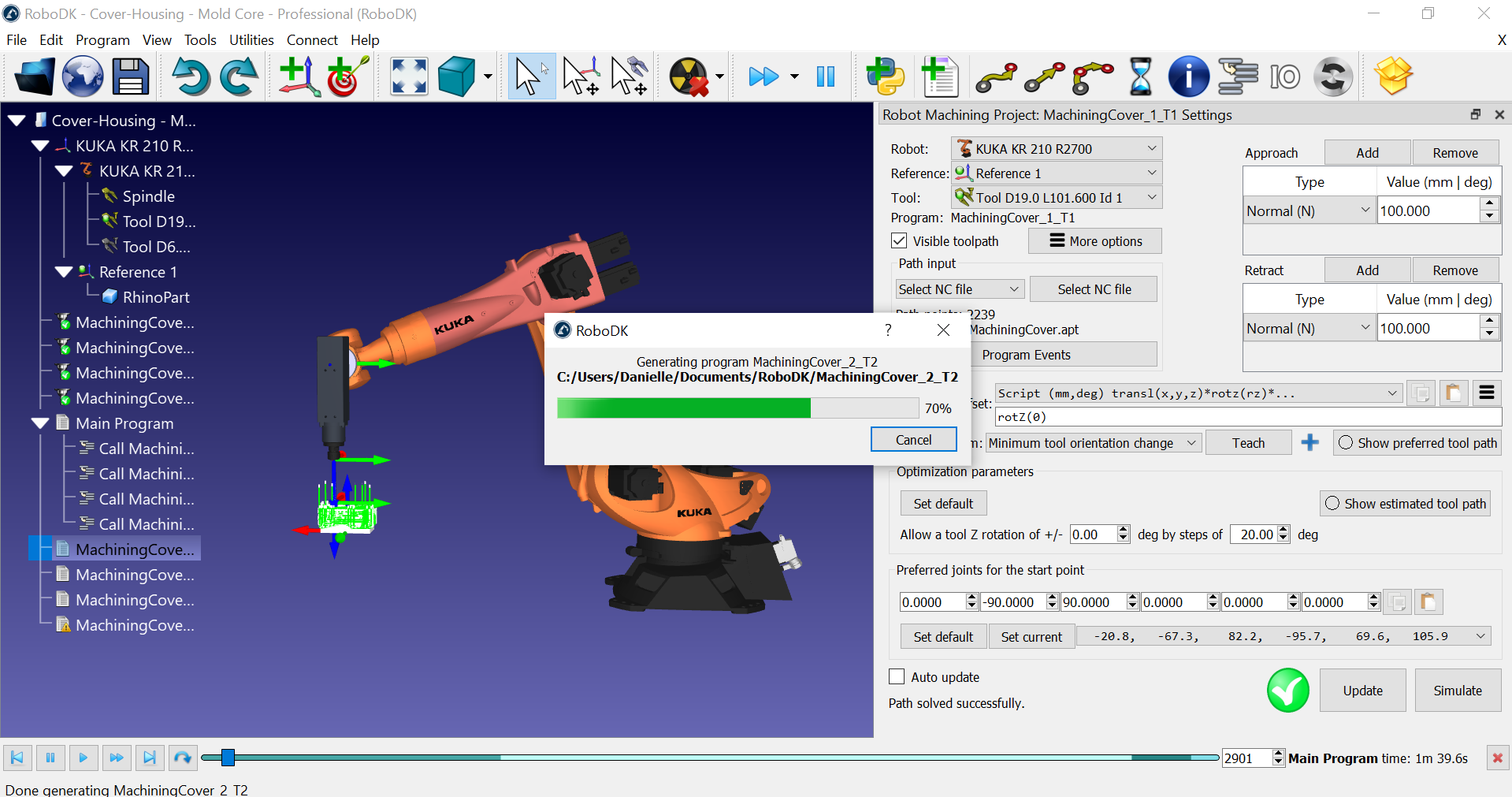
In this example you will obtain SRC program files because we are using a KUKA robot controller.
You should see the reference and the tool defined in the program the same way you defined them in RoboDK.
You can also use numbered reference and tool names to use the values stored in the controller given their ID.
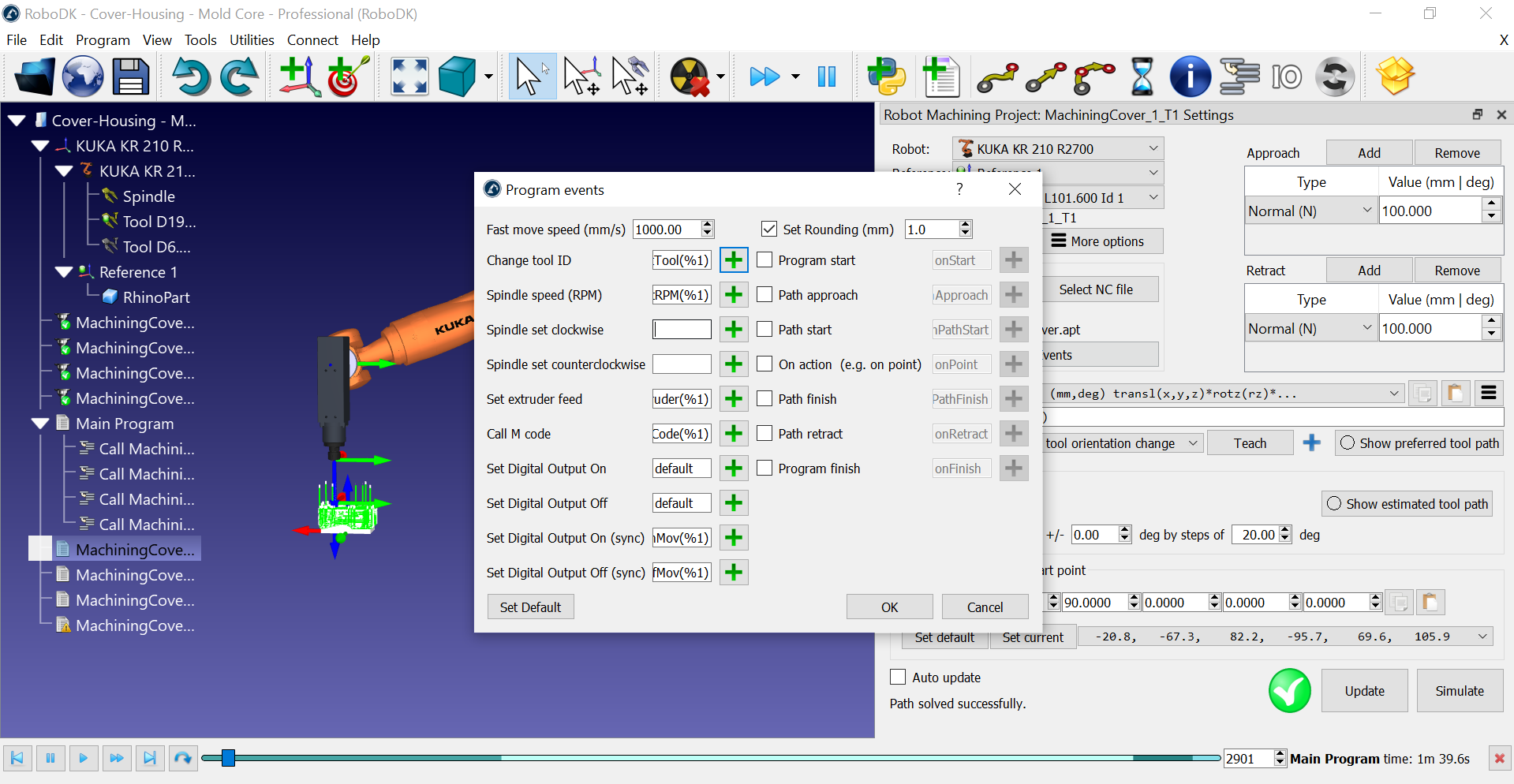
You can see custom program calls to select the correct tool according to your tool ID and activate the spindle. These settings can be customized in theProgram Events menu. You can trigger a special procedure on your robot controller when a certain machining command must be executed, such as changing thetool,spindle speedor runningM codes.