每个机器人都有一个默认的后置处理器,它应该为机器人控制器生成有效的代码。您可以根据使用的机器人控制器轻松更改程序输出。
按照以下步骤更改后处理器:
1.右键单击程序或机器人。
2.选择选择后置处理器更改后置处理器。
此设置将适用于使用同一机器人的所有程序。
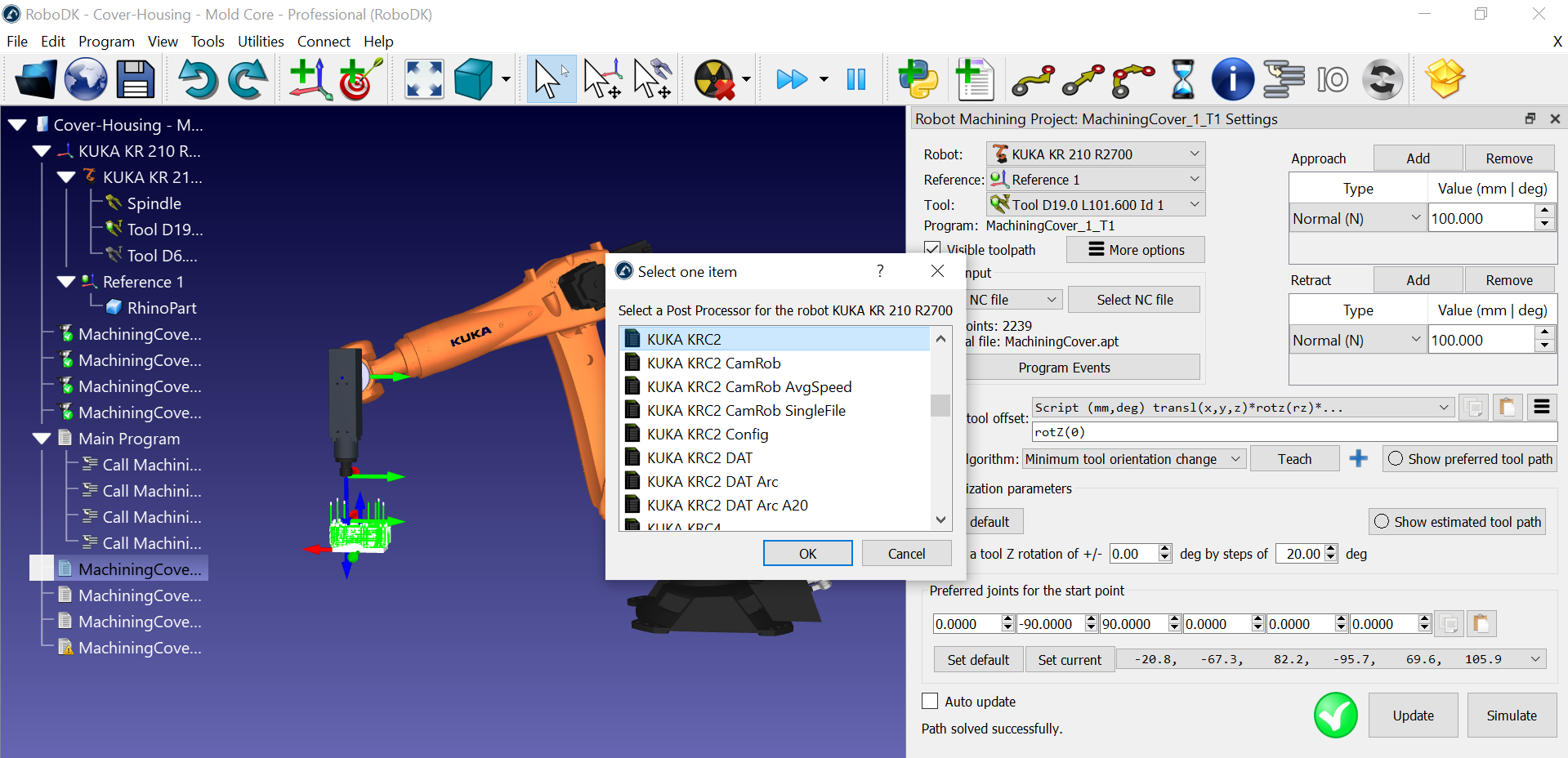
![例3轴机器人加工-图10]()
注意:
RoboDK包括80多个后置处理器,支持50多个机器人制造商。
如果您有一个KUKA机器人,您应该看到默认情况下选择了KUKA KRC2后置处理器。这也应该与KUKA KRC4控制器兼容。如果您愿意,如果您有KRC4控制器,您仍然可以选择KUKA KRC4后置处理器。