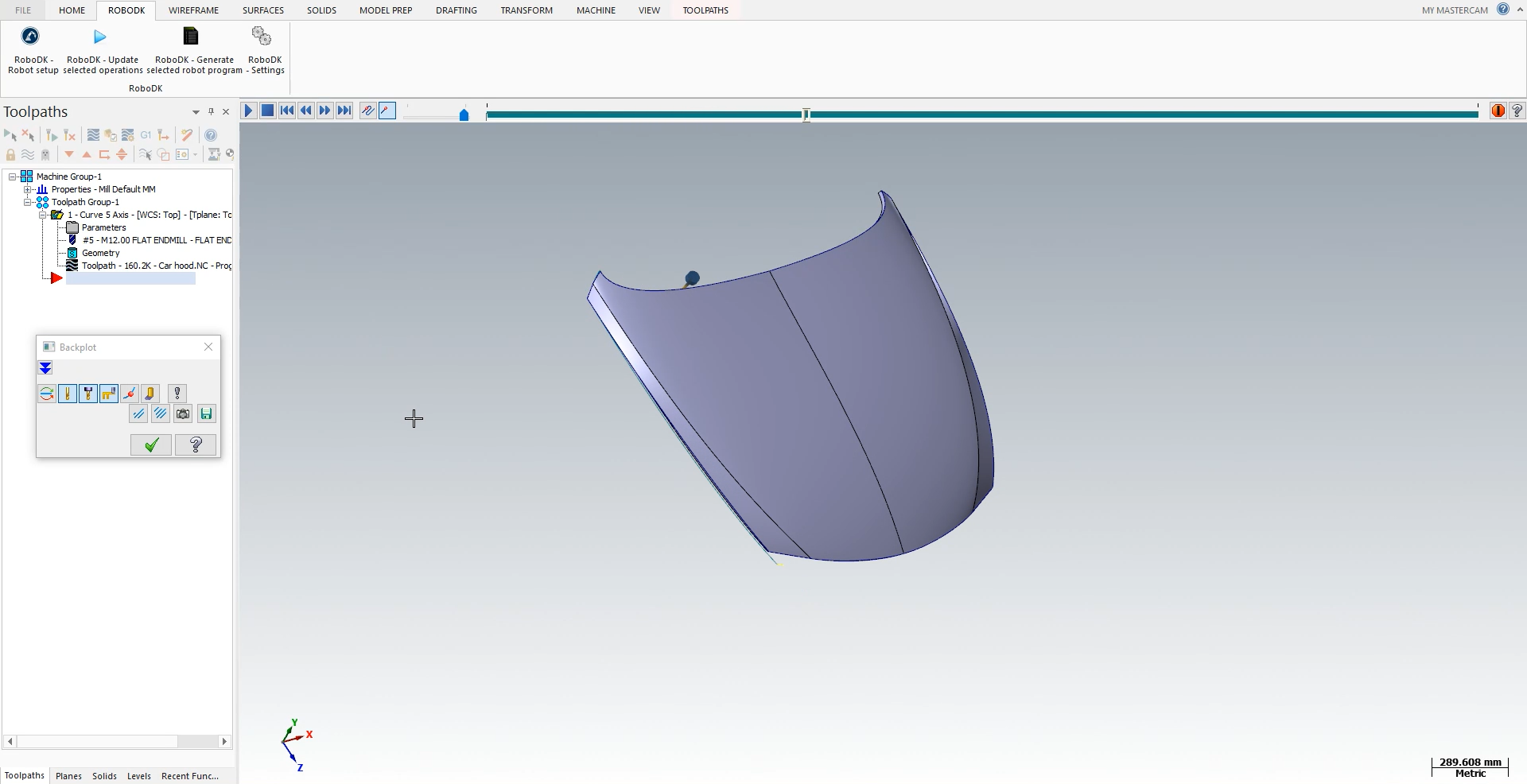
在Mastercam中打开您的3D对象并启动切割模拟。可以看到,软件调整了刀具的方向以匹配切削面。
按照以下步骤将您的部件加载到RoboDK:
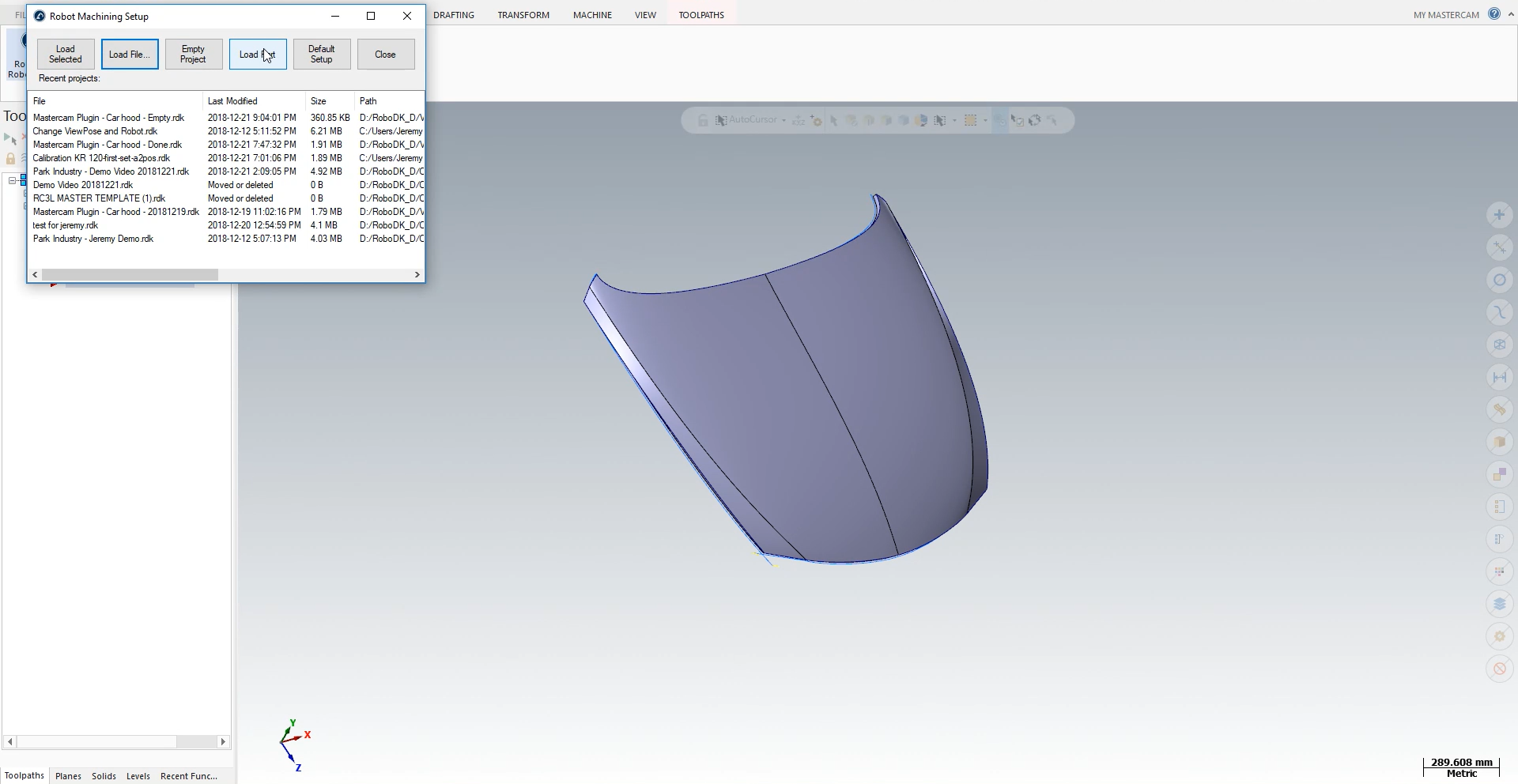
1.选择“RoboDK”页签,选择RoboDK -机器人设置.
2.选择负载部分.
你应该看到部分加载在RoboDK站的夹具上的主动参考架(加工参考架)上。
下一步是从Mastercam导入切割路径到RoboDK。
1.选择RoboDK选项卡。
2.选择RoboDK -更新所选操作.
3.去找RoboDK。