碰撞检测
一个任务将使用机器人的所有工作空间是不寻常的。在创建PRM映射时,约束机器人的关节限制通常是一个好主意。这将加快生成地图的过程,并确保地图中的点位于最佳位置。
对于六轴机器人,最常受到限制的两个关节是:
1.关节1(基础关节)-限制这个关节可以阻止机器人向工作空间的任何一侧移动太远。
2.关节3(肘关节)-限制这个关节可以阻止机器人在肘部向上和肘部向下的结构之间转换。
使用以下步骤更改关节限制:
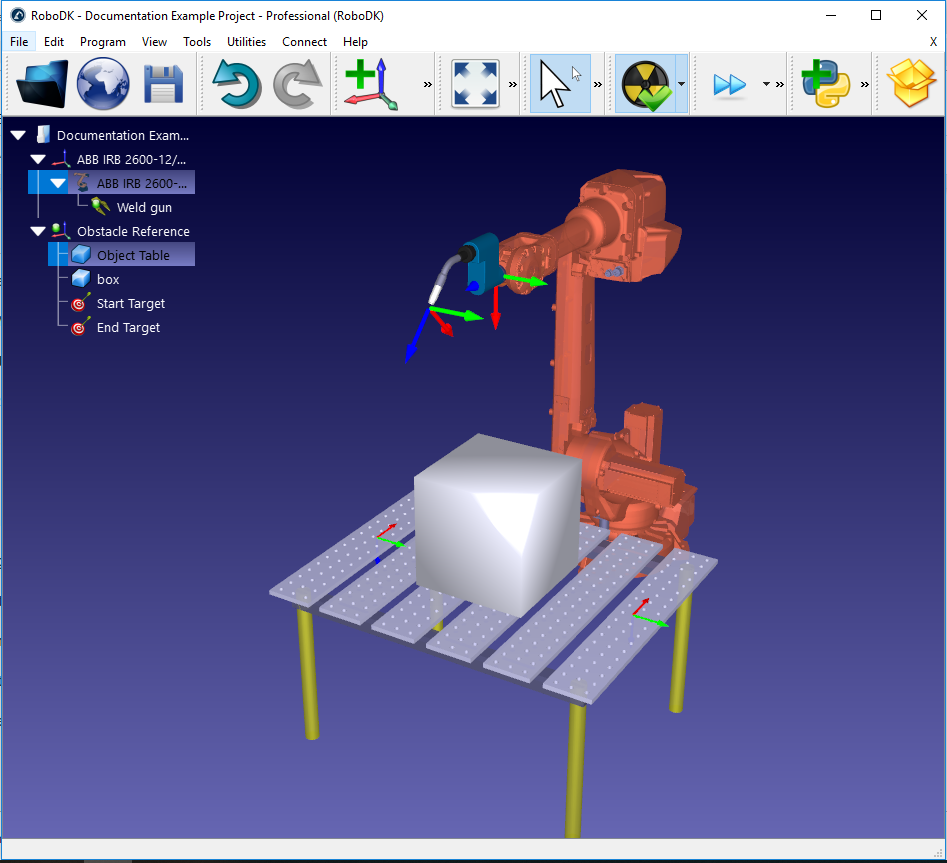
1.右键单击工位树内的机器人模型图标(例如ABB IRB 2600-12/1.85)并选择选择……打开机器人面板。或者,只需双击工作站树中的机器人名称。
2.在关节轴啮合节,移动要限制的机器人关节的滑块(例如:θ1和θ3.)来找到你想要的关节下限。
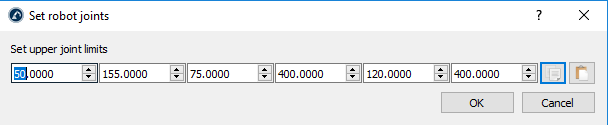
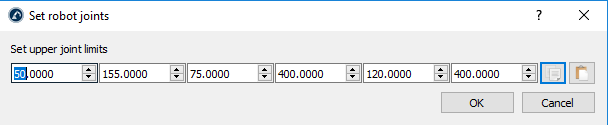
3.控件中的任何较低的关节限制关节轴啮合.例如,如果θ的关节极限1当前是-180,双击数字-180。这会引出设置关节下限面板。
4.将关节下限设置为θ1= -50和θ3.= -90。
5.更改关节限制并单击好吧.
6.采用相同的工艺与关节上限设定θ1= 50。
通过查看机器人可到达的工作空间,可以看到这种变化。控件显示工作空间显示当前工具选项中的工作空间机器人面板的部分。它将显示只有工作空间的一部分现在可以通过新的关节限制到达。