按照以下步骤激活机器人加工项目的自动碰撞检测和碰撞避免:
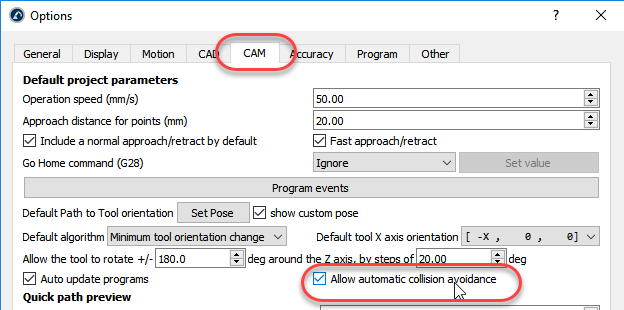
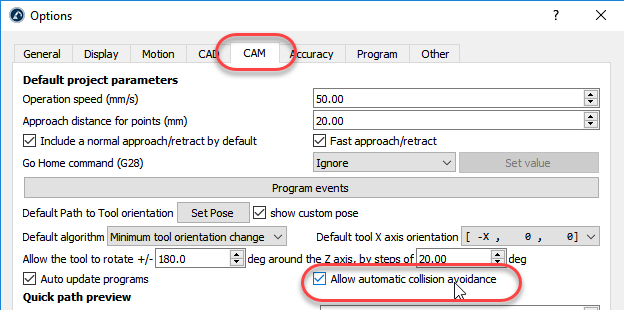
1.选择工具➔选项➔凸轮
2.检查允许自动避碰
![避碰-图像5]()
3.双击你的机器人加工项目,3D打印,曲线跟随或点跟随项目。
4.检查避免碰撞:这将通过改变优化参数中所述的围绕Z轴的工具方向来激活自动避碰。
![避碰-图6]()
重要的是:
此选项将尝试通过旋转工具的Z轴来自动避免碰撞。确保没有检查刀具与零件的碰撞。如果你想检查刀架和零件之间的碰撞,你可能不得不将主轴分成2个工具(一个用于碰撞检测,另一个具有额外的可视化信息,如刀具)。
提示:
机器人加工路径的碰撞检测需要很长的计算时间。确保适当地缩小你的碰撞地图,以帮助加快碰撞检测和避免过程。