We must follow these steps to load a program from a USB drive:
1.Plug the USB drive on the teach pendant
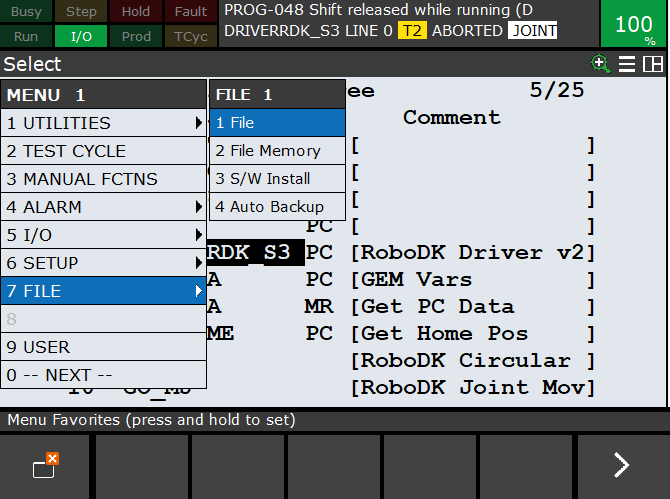
2.SelectMenu➔File
3.SelectUtilities➔Set device➔USB
4.SelectDIR
5.Select the TP or LS program file from the USB disk (BALLBARTEST.TP for example)
This will automatically save the file to theFRmemory of the controller
6.Select the program in theFRmemory and select LOAD (screen button)
![Robots Fanuc - Image 2]()
Important: TheASCII Uploadoption is required for offline programming. This allows loading LS files directly to the controller. Alternatively, LS programs (ASCII files) can be compiled to TP programs (binary files) from the PC using Fanuc’s WinOLPC tools (MakeTP).
Important: The linear speed of programs created with RoboDK is defined by the register R[10] by default. If the speed is not set in the program it must be set manually. In that case:
Select:DATA
➔
Type
➔
再保险gister
, R[10]=50 (for a speed of 50 mm/s)

