2022年10月16日,凌晨02:24
你好,
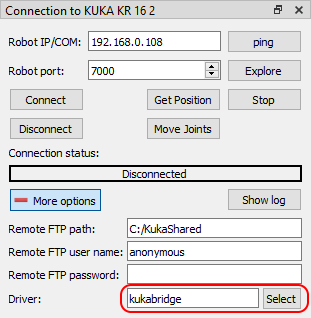
我今天刚让我的机器人运行起来,所有的MoveJ呼叫看起来都很棒。但是,当我调用MoveL时,控制器上的ROBODKSYNC543进程崩溃,错误消息为“COM_E6POS值无效”。我在模拟中广泛运行此代码,一切都运行良好。我附上了一张控制器错误信息的图片。
看起来其他一些人也遇到了这个问题,但我仍然不确定解决方案是什么。
//m.sinclairbody.com/forum/Thread-MoveL-is...=COM_E6POS
//m.sinclairbody.com/forum/Thread-MoveL-no...=COM_E6POS
我是Kuka和robodk在线编程的新手,所以如果我需要配置我的工具有什么特别的地方,我可能还没有做过。
RoboDK连接日志没有显示太多,除了在“Working…”时冻结。
一如既往,感谢您的帮助!
我今天刚让我的机器人运行起来,所有的MoveJ呼叫看起来都很棒。但是,当我调用MoveL时,控制器上的ROBODKSYNC543进程崩溃,错误消息为“COM_E6POS值无效”。我在模拟中广泛运行此代码,一切都运行良好。我附上了一张控制器错误信息的图片。
看起来其他一些人也遇到了这个问题,但我仍然不确定解决方案是什么。
//m.sinclairbody.com/forum/Thread-MoveL-is...=COM_E6POS
//m.sinclairbody.com/forum/Thread-MoveL-no...=COM_E6POS
我是Kuka和robodk在线编程的新手,所以如果我需要配置我的工具有什么特别的地方,我可能还没有做过。
RoboDK连接日志没有显示太多,除了在“Working…”时冻结。
代码:
发送命令……
工作……
准备好了
发送命令……
工作……
一如既往,感谢您的帮助!